Исследование асинхронного двигателя с фазным ротором
Цель работы: ознакомиться с конструкцией асинхронного двигателя с фазным ротором. Изучить пуск, регулирование частоты вращения изменением скольжения, реверсирование. Снять пусковую диаграмму, рабочие, механические и регулировочную характеристики двигателя.
Общие сведения
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Это определение используется во всех тематических обсуждениях этой статьи. Если частота увеличивается выше 50 Гц, двигатель будет работать быстрее, чем его номинальная скорость, а если частота напряжения питания меньше 50 Гц, двигатель будет работать медленнее, чем его номинальная скорость. В соответствии с принципом работы частотно-регулируемого привода это электронный контроллер, специально предназначенный для изменения частоты напряжения, подаваемого на.
Обычно это ограничивало размер двигателя, который можно было контролировать по частоте, и они обычно не использовались. Только эта функция может обеспечить окупаемость более чем через год после покупки. Важно помнить, что при использовании традиционного пускателя двигателя, когда они начинают, они будут прикладывать ток с фиксированным ротором. Когда сила тока блокированного ротора встречается во многих двигателях на заводе-изготовителе, это подталкивает слишком высокий спрос на электроэнергию, что часто приводит к тому, что завод платит штраф за всю электроэнергию, потребляемую в течение расчетного периода.
Асинхронный двигатель с фазным ротором (двигатель с контактными кольцами), принципиальная схема которого приведена на рис.1, состоит из двух частей: неподвижной части ― статора и вращающейся ― ротора.
Статор (рис.2) представляет собой станину (корпус) (1), выполненную из чугунного литья в виде цилиндрической отливки с лапами для крепления на фундаменте. Внутрь станины запрессован пакет (2), представляющий собой пустотелый цилиндр, набранный из отдельных, покрытых специальным изолирующим лаком, тонких листов электротехнической стали с выштампованными вдоль внутренней поверхности пазами (3).
Сегодня, пожалуй, наиболее распространенный тип вывода или нагрузки для системы управления. Количество полюсов на статоре двигателя может быть увеличено или уменьшено, но это имеет ограниченную полезность. Обычно предпочтительны трехфазные двигатели, но с некоторыми типами однофазных двигателей. Часто используются двигатели, предназначенные для работы с постоянным напряжением постоянного тока, но некоторые усовершенствования стандартных моторных работ обеспечивают более высокую надежность и лучшую производительность.
Например, если двигатель рассчитан на работу при 460 вольт при 60 Гц, при уменьшении частоты до 30 Гц приложенное напряжение должно быть уменьшено до 230 вольт. Таким образом, отношение вольт на каждый герц должно регулироваться до постоянного значения. Вызывается наиболее распространенный метод, используемый для регулировки напряжения двигателя.
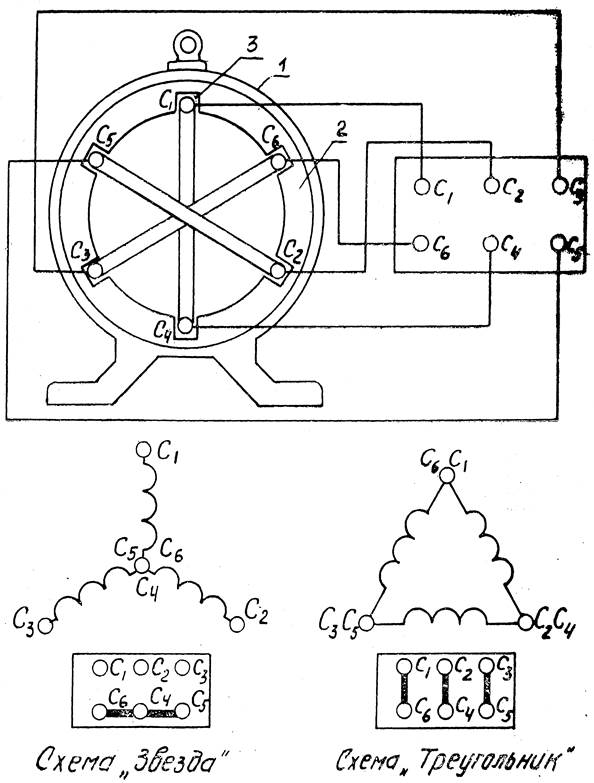
В пазах уложена трехфазная обмотка статора, состоящая из трех одинаковых фазовых обмоток , повернутых друг относительно друга вдоль окружности пакета статора на 120 электрических градусов. Начало обмотки и концы выведены на щиток машины.
Наличие шести выводов дает возможность соединять обмотки статора или по схеме «звезда» или по схеме «треугольник». К клеммам подключается питающая двигатель трехфазная сеть. К торцам станины крепятся подшипниковые щиты, в центре которых расположены шариковые подшипники вала ротора.
Чем выше частота, подаваемая на двигатель, тем быстрее она будет работать. Производители двигателей перечисляют максимальную скорость, с которой их двигатели могут безопасно работать. Асинхронный двигатель стал наиболее широко используемым типом двигателя в промышленности. Это связано с тем, что большинство существующих систем распределения электроэнергии имеют переменный ток. По сравнению с двигателем постоянного тока асинхронный двигатель имеет преимущество своей простоты, что приводит к низкой стоимости и максимальной эффективности при минимальном обслуживании.

Ротор (рис. 3) представляет собой напрессованный на вал цилиндр (пакет ротора) (1), набранный из отдельных, покрытых специальным изолирующим лаком, тонких листов электротехнической стали с выштампованными вдоль наружной поверхности пазами (2). В пазах уложена трехфазная обмотка ротора выполненная по типу статорной обмотки и соединенная по схеме «звезда».
Эффективность высокая для средней и максимальной нагрузки, и при правильном выборе можно обеспечить хороший коэффициент мощности. 2-Электродвигатели и его значение. Асинхронный двигатель состоит в основном из следующих элементов: - статическая магнитная цепь, состоящая из ферромагнитных пластин, уложенных и изолированных друг от друга, который называется статором; - катушками, расположенными в открытых кривошипах на статоре и питаемыми от сети переменного тока; ротором, состоящим из ферромагнитного сердечника, также ламинированного, на котором расположена обмотка или множество параллельных проводников, в которых токи индуцируются переменным током катушек статора.
Начало фаз обмотки , , выведены внутри пустотелого вала и присоединены к контактным кольцам (3). На кольцах наложены медно-графитные щетки (4) ,соединенные с клеммами , , на щитке ротора.

Ротор поддерживается на валу, который, в свою очередь, передает нагрузке вырабатываемую механическую энергию. Воздушный зазор значительно уменьшен, чтобы уменьшить ток без нагрузки и, следовательно, потери, а также увеличить коэффициент мощности в вакууме.
Порядок выполнения работы
В качестве примера мы представляем «проецирование» различных элементов асинхронного роторного двигателя в клетке белки. Лодочный мотор, также называемый искаженным двигателем поля, благодаря его запуску, проще, надежнее и экономичнее для нефазных асинхронных двигателей. Конструктивно существует несколько типов, и одна из наиболее распространенных форм - это выступающие полюса. Каждый полюс будет иметь часть, охватываемую короткой медной петлей. Ток, индуцированный в этом цикле, заставляет поток через него страдать от задержки по отношению к потоку части, не охваченной им.
Клеммы , , служат для присоединения к обмотке ротора трехфазного пускорегулировочного реостата (рис. 4), который состоит из трех, разделенных на секции, одинаковых активных сопротивлений , соединенных по схеме «звезда». Величину можно уменьшить ступенями ( , , , , = 0), замыкая контакты , , , последовательным переводом рукоятки (маховичка) реостата из положения в положения 3, 2, 1, = 0.
Результат этого похож на вращающееся поле, движущееся в направлении неоткаленной части к охватываемой части полюса, создавая крутящий момент, который заставит двигатель сломаться и достигнет номинального вращения. Поэтому направление вращения зависит от того, где расположена часть полюса. Следовательно, искаженный двигатель поля имеет одно направление вращения. Обычно это можно изменить путем изменения положения наконечника вала ротора относительно статора. Существуют и другие способы вращения инверсии, но гораздо более дорогостоящие.
Принцип действия асинхронного двигателя с фазным ротором
Ток, идущий по обмоткам статора под действием приложенного к зажимам трехфазного напряжения, создает внутри статора вращающийся магнитный поток « ». Частота вращения этого потока относительно статора определяется формулой:
где − частота питающей трехфазной сети, Гц,
Что касается производительности, искаженные полевые двигатели имеют низкий пусковой момент, низкий выход и низкий коэффициент мощности. Этот двигатель имеет основную обмотку и вспомогательную обмотку, оба отстают на 90 градусов. Вспомогательная обмотка создает фазовый сдвиг, который создает крутящий момент, необходимый для начального вращения и ускорения. Когда двигатель достигает заданной скорости, вспомогательная обмотка отключается от сети с помощью переключателя, который обычно приводится в действие центробежной силой или в определенных случаях с помощью реле тока, ручного переключателя или других специальных устройств.
р − число пар полюсов обмотки статора,
− частота вращения магнитного потока, об/мин.
Направление вращения потока определяется порядком чередования фаз статора. Изменение порядка чередования фаз реверсирует магнитный поток. Чтобы изменить порядок чередования фаз, достаточно поменять местами любые два из трех проводов, соединяющих статор с сетью. Величина вращающегося магнитного потока , являющегося суммой трех синусоидальных магнитных потоков фазных обмоток статора, не изменяется во времени и определяется формулой:
Исследование асинхронного двигателя с фазным ротором
Поскольку вспомогательная обмотка предназначена для работы только при запуске, если она не отключается сразу после пуска, она будет повреждена. Угол запаздывания, который может быть получен между токами основной обмотки и вспомогательной обмоткой, мал, и поэтому эти двигатели имеют пусковой крутящий момент, равный или немного превышающий номинальный, что ограничивает их применение для дробных мощностей и нагрузок которые требуют небольшого пускового момента, например, офисных машин, вентиляторов и вытяжек, небольших полировщиков, герметичных компрессоров, центробежных насосов и т.д.
где ─ амплитуда синусоидального изменяющегося магнитного потока фазной обмотки статора.
Величина прямо пропорциональна приложенному к зажимам статора напряжению и при U = const также постоянна. При вращении магнитный поток своими силовыми линиями пересекает проводники обмотки ротора и наводит в них трехфазную ЭДС. Так как обмотка ротора замкнута (с одной стороны ─ общей точкой соединенных в звезду фазных обмоток ротора, с другой ─ общей точкой соединенных в звезду сопротивлений реостата ), то по ней пойдет трехфазный ток ротора , который создает вращающийся поток ротора .
Это двигатель, подобный разлому. Основное различие заключается в включении электролитического конденсатора последовательно со вспомогательной обмоткой стартера. Конденсатор обеспечивает больший угол задержки между основным и вспомогательным токами обмотки, обеспечивая тем самым высокие стартовые моменты. Как и в двухфазном двигателе, вспомогательная цепь отключается, когда двигатель достигает от 75% до 80% от синхронной скорости. В этом диапазоне скоростей основная обмотка вырабатывает почти тот же крутящий момент, что и комбинированные обмотки.
Потоки и вращаются синхронно и образуют общий вращающийся поток двигателя Ф. Общий магнитный поток, сцепленный и с обмоткой статора, и с обмоткой ротора, наводит в них электродвижущие силы. В этом аналогия асинхронного двигателя с трансформатором.
В результате взаимодействия токов ротора с потоком Ф возникают действующие на проводники обмотки ротора механические силы, создающие вращающий электромагнитный момент М. Если вращающий момент М больше статического тормозного момента на валу , то ротор двигателя придет во вращение в направлении вращения поля с частотой вращения < . Относительную разность частот вращения поля и ротора называют скольжением.
Для более высоких скоростей, между 80% и 90% синхронной скорости, кривая крутящего момента с объединенными обмотками пересекает кривую крутящего момента основной обмотки, так что для скоростей выше этой точки двигатель развивает более низкий крутящий момент для любого скольжения, с подключенной вспомогательной цепью, без нее. Поскольку кривые не всегда пересекаются в одной и той же точке, а центробежный прерыватель не всегда открывается с точно такой же скоростью, общепринятой практикой является то, чтобы апертура происходила в среднем как раз перед пересечением кривых.
Частота вращения ротора, выраженная через скольжение будет
![]() .
.
При пуске двигателя = 0, а s = 1. Если бы ротор вращался синхронно с полем статора ( = ), то скольжение было бы равно нулю (s = 0). При магнитное поле статора неподвижно относительно ротора и токи в роторе индуктироваться не будут, поэтому М = 0. Следовательно, такой частоты вращения двигатель достичь не может, отсюда и название ─ асинхронный (неодновременный).
После открытия вспомогательной цепи ее работа идентична работе электродвигателя с разделением фазы. Благодаря своему стартовому крутящему моменту двигатель стартового конденсатора может использоваться в самых разнообразных применениях и изготовлен для мощности от ¼ до 15 л.с.
Учитывая, что большинство жилых, коммерческих и некоторых промышленных применений требуют мало энергии, например, в вентиляторах, бытовых приборах, небольших насосах. Вращающееся поле рассматриваемого двигателя имеет определенные особенности, такие как необходимость вспомогательной обмотки для его генерации. Чтобы обратить вспять направление вращения этого типа двигателя, вам также нужна схема, которая может сделать ваш отъезд в другом месте. Являясь одним из наиболее используемых, очень важно, чтобы у вас были знания о его работе, для лучшего дизайна и последующего применения.
Энергетическая диаграмма
Преобразование энергии в асинхронном двигателе, также как и в других электрических машинах, сопровождается ее потерями. Эти потери, которые можно разделить на три вида: электрические, магнитные и механические, и весь процесс преобразования мощности наглядно представлен на энергетической диаграмме (рис. 5).
Ключевые слова: трехфазный асинхронный двигатель, вращающееся поле. Однофазные асинхронные двигатели имеют большую применимость и функциональность, начиная от наших резиденций и заканчивая отраслями промышленности и вращающимся оборудованием. Характеристики, подлежащие анализу в полученной статье, - это то, как работает один из основных типов однофазных двигателей с вспомогательной обмоткой и конденсатором. Определяется для приложений с низким энергопотреблением из-за его проектного ограничения и использования только одной фазы переменного тока.
Мощность, подводимая к двигателю из сети:
⋅ ⋅ cos , Вт,
где – напряжение, приложенное к фазе обмотки статора, В;
– ток в фазе обмотки статора, А;
cos – коэффициент мощности двигателя.

Электрическая энергия, подводимая к статору, частью теряется в статоре на потери от вихревых токов и гистерезиса в стали () и на потери в проводниках обмотки ()
Однофазные асинхронные двигатели построены так, чтобы удовлетворить потребность в вращательном движении в ситуациях, когда имеется только одна фаза переменного тока. Используется в большинстве случаев для простых, но незаменимых приложений в настоящее время, таких как офисы, дома и магазины, места, где требуется не большая мощность.
Однофазный двигатель, рисунок 1, имеет статор и ротор, как и любой другой электромагнитный привод. Однако, поскольку он является однофазным компонентом, он имеет только один набор катушек, аналогичный однофазному виду трехфазного асинхронного двигателя. Однофазный двигатель использует обмотку для ротора с короткозамкнутым ротором.
где – активное сопротивление фазы обмотки статора;
– число фаз обмотки статора (для трехфазного двигателя = 3).
Оставшаяся часть мощности при помощи магнитного потока передается на ротор и поэтому называется электромагнитной мощностью ()
― ( + ), Вт.
Часть электромагнитной мощности затрачивается на покрытие электрических потерь в обмотке ротора, она пропорциональна скольжению
Рисунок 1 - Однофазный индукционный двигатель. Говорят, что однофазный двигатель не имеет вращающегося поля, а пульсирующего магнитного поля. Для запуска двигателя потребуются вспомогательные обмотки и использование конденсатора, чтобы вызвать вторую ложную фазу, позволяющую происходить поворотное и сопряженное поле, достаточное, чтобы заставить его покинуть дом. Ток во вспомогательной обмотке позволяет соединить с током основной обмотки вращающееся магнитное поле в статоре.
При запуске двигателя выключатель отключает вспомогательную обмотку, и в этих случаях пусковой момент остается умеренным. В качестве решения, чтобы создать достаточный крутящий момент для определенных применений, конденсатор используется последовательно со вспомогательной обмоткой. На рисунке 2 представлена эквивалентная электрическая схема этого процесса.
Остальная часть электромагнитной мощности преобразуется в механическую мощность двигателя, называемую полной механической мощностью
Механическая мощность на валу двигателя , Вт, меньше полной механической мощности на величину механических и добавочных потерь.
Коэффициент полезного действия двигателя
Характеристика двигателя
Как и всякий другой электродвигатель, асинхронный двигатель с фазным ротором оценивается по совокупности пусковых, рабочих и регулировочных характеристик. Пуск двигателя и его разгон до минимальной частоты вращения можно проследить по изменению механических характеристик и пусковых токов в зависимости от величины добавочного активного сопротивления , введенного в цепь ротора.
Механической характеристикой называется зависимость частоты вращения от вращающего момента на валу при постоянном активном сопротивлении в цепи ротора, т.е.
= f (M) при = const.
Семейство механических характеристик асинхронного двигателя с фазным ротором приведено на рис. 6.
| |
| |
| |
Вид механической характеристики определяет поведение электропривода
в переходных режимах пуска, торможения, изменения частоты вращения, что существенно отражается на производительности механизма, а также на его надежности в условиях эксплуатации. Механические характеристики двигателя при введенном в цепь ротора активном сопротивлении называются искусственными; каждому значению соответствует своя искусственная механическая характеристика. Механическая характеристика при отсутствии добавочного сопротивления в цепи ротора ( = 0) называется естественной. Естественная и искусственные механические характеристики пересекаются в общей точке оси ординат – частоты вращения , вращающегося магнитного поля статора. Работа двигателя на естественной механической характеристике наиболее экономична. Естественная механическая характеристика является самой жесткой, т.е. при изменении нагрузки частота вращения двигателя изменяется незначительно. Но при работе на естественной механической характеристике двигатель имеет малый пусковой момент = (0,7 ÷ 1,8) и большой пусковой ток
= (5,5 ÷ 7,0)
Активное сопротивление , вводимое в цепь ротора, уменьшает ток в момент пуска и одновременно увеличивает пусковой момент, т.е. улучшает пусковые характеристики двигателя. Поэтому пуск асинхронного двигателя с фазным ротором осуществляется на искусственных механических характеристиках (участки ab, cd, ef, gh пусковой диаграммы).
Переход с одной искусственной характеристики на другую происходит после выведения очередной секции сопротивления.
Точка «k» диаграммы соответствует началу работы двигателя на естественной механической характеристике.
Сопротивление , вводимое в каждую фазу обмотки ротора перед пуском, подбирается таким, чтобы пусковой момент был равен критическому моменту, т.е. = .
Как известно, максимальный момент имеет место при критическом скольжении , которое определяется формулой:
где – активное сопротивление фазы обмотки ротора, Ом;
– индуктивное сопротивление фазы обмотки неподвижного ротора, Ом.
Для получения максимального пускового момента должно быть выполнено условие
![]() = 1
= 1
Число ступеней сопротивления выбирают в соответствии с требованиями плавности пуска.
Рабочие характеристики асинхронного двигателя с фазным ротором представляют собой зависимости частоты вращения n, вращающего момента M, потребляемого тока , коэффициента мощности сos , КПД η от мощности на валу при = const и f 1 = const, т.е.
М, , сos , η = f (
По рабочим характеристикам судят об основных свойствах двигателя. В частности, по ним может быть построена механическая характеристика
n = f (М). Рабочие характеристики двигателей малой мощности можно снять методом непосредственной нагрузки с помощью электромагнитного тормоза. Для двигателей средней и большой мощности рабочие характеристики определяют посредством круговой диаграммы. Примерный вид рабочих характеристик асинхронного двигателя приведен на рис. 7.

Регулировочная характеристика асинхронного двигателя с фазным ротором = f() представляет зависимость частоты вращения двигателя при постоянном моменте нагрузки на валу от величины активного сопротивления. Введением в цепь ротора двигателя сопротивления можно регулировать и частоту вращения в сторону уменьшения от номинальной. Диапазон регулирования будет тем шире, чем сильнее нагружен двигатель. Регулирование частоты вращения осуществляется за счет перевода двигателя на работу с естественной характеристики на более мягкие искусственные характеристики. Данный способ регулирования частоты вращения не экономичен, т.к. велики потери энергии в сопротивлении . На рис. 6 показан диапазон возможного регулирования частоты вращения при номинальной нагрузке.
Электромагнитный тормоз
Нагрузка исследуемого асинхронного двигателя осуществляется посредством электромагнитного тормоза ЭТ (рис. 8), состоящего из магнитной системы и стального диска. В магнитную систему входят магнитопровод и обмотка ОВТ (обмотка возбуждения тормоза). Диск находится на одном валу с электродвигателем и приводится последним во вращении.
Принцип действия тормоза основан на создании тормозящего момента от взаимодействия вихревых токов стального диска с магнитным потоком обмотки ОВТ, возбужденным постоянным током.
Магнитная система может поворачиваться относительно вала диска, причем угол ее поворота зависит от момента нагрузки на двигатель. Шкала тормоза, отградуированная в единицах вращающего момента, позволяет производить отсчет нагрузки электродвигателя в Н. м.
Порядок выполнения работы
ВНИМАНИЕ!
При выполнении работы соблюдайте правила техники безопасности, изложенные в инструкции на рабочем месте!
НЕ ВКЛЮЧАЙТЕ СХЕМУ, НЕ ПРОВЕРЕННУЮ РУКОВОДИТЕЛЕМ ЗАНЯТИЙ!!!
1. Ознакомиться с оборудованием и приборами установки для исследования двигателя.
а) Клеммный щиток асинхронного двигателя с фазным ротором типа МКА-13, ознакомиться с расположением зажимов обмотки статора: ![]() и зажимов обмотки ротора , , .
и зажимов обмотки ротора , , .
б) электромагнитный тормоз «ЭТ», находящийся на одном валу с двигателем, и реостат тормоза .
в) трехфазный пускорегулирующий реостат ;
г) измерительные приборы: амперметр, вольтметр, ваттметр;
д) датчик и индикатор электротахометра;
е) клеммы А, В, С на лабораторном щите и автомат А4;
ж) клеммы (+), (―) 110 В на лабораторном щите и автомат А2.
2. Ознакомиться с технической характеристикой двигателя по паспорту.
В отчете указать основные данные (тип, мощность, напряжение, ток, частота, частота вращения ротора, КПД, коэффициент мощности, Э.Д.С. и ток ротора).
3.Ознакомиться с электротахометром.
Индикатор электротахометра имеет две стрелки: меньшая стрелка показывает целые тысячи оборотов в минуту, большая стрелка ― сотни оборотов.
4. Собрать схему для исследования двигателя (рис. 8).
5. Записать основные технические данные измерительных приборов в таблицу 1.
Таблица 1
6. Подготовить двигатель к пуску:
6.1. Рукоятку реостата тормоза поставить в положение «откл».
6.2. Движок реостата поставить в положение .
7. Дать схему на проверку руководителю занятий.
8. После проверки схемы руководителем и ПОЛУЧЕНИЯ РАЗРЕШЕНИЯ НА ВКЛЮЧЕНИЕ включить автомат А2 и реостатом установить ток = 0,7 А.
9. Снять данные для построения пусковой диаграммы.
9.1. Включить автомат А4.
9.2. Замерить бросок линейного тока в момент перевода рукояти из положения «откл» в положение , т.е. при = 0.
9.3. Дождавшись установившейся работы двигателя на данной ступени (стрелка тахометра перестает перемещаться), замерить максимальное значение частоты вращения и соответствующее ему минимальное значение линейного тока . Результат занести в первую строку таблицы 2 (1-я ступень).
9.4. Выполнить подобные замеры для остальных пусковых ступеней (при переходе рукоятки реостата из положения « » в положение 3, из 3 в положение 2 и т.д.). Данные измерений занести в таблицу 2.
Минимальное значение частоты вращения данной ступени равно максимальному ее значению на предыдущей ступени, т.е. переход двигателя с одной характеристики на другую происходит при n = const.
10. Выключить двигатель в последовательности.
Министерство науки и образования Российской Федерации
Федеральное агентство по образованию
Государственное образовательное учреждение
Высшего профессионального образования
Национальный исследовательский
ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра Электроснабжения и Электротехники
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Отчет по лабораторной работе №11
по дисциплине «Общая электротехника и электроника»
Выполнил
Студент СМо-11-1 ________ Копытко Я.В. 20.10.2012
Доцент каф. Э и ЭТ ________ Кирюхин Ю.А. __________
(подпись) Фамилия И.О. (дата)
Иркутск 2012
Цель работы 3
1 Краткие теоретические сведения 3
Оборудование электрической установки 7
2 Порядок выполнения работы 7
3 Расчетная часть 9
4 Графики 10
Контрольные вопросы 14
Список литературы 17
Цель работы
Ознакомиться с устройством и принципом действия трехфазного асинхронного двигателя с короткозамкнутым ротором и исследовать влияние напряжения на фате статора на его характеристики.
1 Краткие теоретические сведения
1)Устройство, принцип действия асинхронного двигателя.
Асинхронный двигатель – это машина переменного тока. Слово “асинхронный” означает не одновременный. При этом имеется в виду, что у асинхронных двигателей частота вращения магнитного поля отличается от частоты вращения ротора. Основными частями машины являются статор и ротор, отделенные друг от друга равномерным воздушным зазором.
Статор – неподвижная часть машины. Его сердечник с целью уменьшения потерь на вихревые токи набирают из штампованных листов электротехнической стали толщиной 0,35 – 0,5 мм, изолированных друг от друга слоем лака. В пазы магнитопровода статора укладывается обмотка. В трехфазных двигателях обмотка трехфазная. Фазы обмотки могут соединяться в звезду или в треугольник в зависимости от величины напряжения сети.
Ротор – вращающаяся часть двигателя. Магнитопровод ротора представляет собой цилиндр, набранный из штампованных листов электротехнической стали. В пазах ротора укладывают обмотку. В зависимости от типа обмотки роторы асинхронных двигателей делятся на короткозамкнутые и фазные (с контактными кольцами). Короткозамкнутая обмотка представляет собой неизолированные медные или алюминиевые стержни, соединенные с торцов кольцами из этого же материала (“беличья клетка”).
У фазного ротора в пазах магнитопровода уложена трехфазная обмотка, фазы которой соединены звездой. Свободные концы фаз обмотки присоединены к трем медным контактным кольцам, насаженным на вал двигателя. Контактные кольца изолированы друг от друга и от вала. К кольцам прижаты угольные или медно-графитные щетки. Через контактные кольца и щетки в обмотку ротора можно включить трехфазный пуско-регулировочный реостат.
Преобразование электрической энергии в механическую в асинхронном двигателе осуществляется посредством вращающегося магнитного поля. Необходимыми условиями возбуждения вращающегося магнитного поля являются:
пространственный сдвиг осей катушек статора;
временной сдвиг токов в катушках статора.
Первое требование удовлетворяется соответствующим расположением намагничивающих катушек на магнитопроводе статора. Оси фаз обмотки смещены в пространстве на угол 120°. Второе условие обеспечивается подачей на катушки статора трехфазной системы напряжений.
При включении двигателя в трехфазную сеть в обмотке статора устанавливается система токов одинаковой частоты и амплитуды, периодические изменения которых относительно друг друга совершаются с запаздыванием на 1/3 периода.
Токи фаз обмотки создают магнитное поле, вращающееся относительно статора с частотой , об/мин, которая называется синхронной частотой вращения двигателя:

где
 - частота тока сети, Гц,
- частота тока сети, Гц,
р – число пар полюсов магнитного поля.
При
стандартной частоте тока сети
 ,
частота вращения поля
,
частота вращения поля

|
|
 ,
об/мин
,
об/минВращаясь, поле пересекает проводники ротора, наводя в них ЭДС. При замкнутой обмотке ротора ЭДС вызывает токи, при взаимодействии которых с вращающимся магнитным полем возникает вращающий электромагнитный момент. Скорость вращения ротора в двигательном режиме асинхронной машины всегда меньше скорости вращения поля, т.е. ротор “отстает” от вращающегося поля. Только при этом условии в проводниках ротора наводится ЭДС, протекает ток и создается вращающий момент. Явление отставания ротора от магнитного поля называется скольжением. Степень отставания ротора от магнитного поля характеризуется величиной относительного скольжения:

где n– частота вращения ротора, об/мин.
Для асинхронных двигателей скольжение может изменяться в пределах от 1 (пуск) до величины, близкой к 0 (холостой ход).
2 ) Пуск асинхронных двигателей.
При пуске двигателя должны выполнятся следующие требования:
1. Малая величина пускового тока;
2. Достаточный по величине пусковой момент;
3. Плавное нарастание скорости;
4. Простота и экономичность пуска.
В зависимости от конструкции ротора (короткозамкнутый или фазный), мощности двигателя, характера нагрузки возможны различные способы пуска.
Для двигателей с короткозамнутым ротором используют прямой пуск и пуск при пониженном напряжении.
1. Прямой пуск. При этом обмотка статора включается непосредственно в сеть на полное напряжение. Прямой пуск допустим только для асинхронных двигателей с короткозамкнутым ротором малой и средней мощности (до 15-20 кВт). Однако при значительной мощности питающей сети этот способ можно распространить на двигатели большей мощности (примерно до 50 кВт).
2.
Пуск
при пониженном напряжении
.
Пусковой ток двигателя пропорционален
напряжению на фазах обмотки статора ,
поэтому уменьшение напряжения
,
поэтому уменьшение напряжения сопровождается соответствующим
уменьшением пускового тока. Однако
такой способ приводит к уменьшению
начального пускового момента, который
пропорционален квадрату напряжения на
фазах обмотки статора. Ввиду значительного
снижения пускового момента указанный
способ пуска применим только при малых
нагрузках на валу.
сопровождается соответствующим
уменьшением пускового тока. Однако
такой способ приводит к уменьшению
начального пускового момента, который
пропорционален квадрату напряжения на
фазах обмотки статора. Ввиду значительного
снижения пускового момента указанный
способ пуска применим только при малых
нагрузках на валу.
Имеется несколько
способов понижения напряжения
 в момент пуска:
в момент пуска:
а) при легком пуске асинхронных двигателей средней мощности, которые нормально работают при соединении фаз обмотки статора треугольником, применяют снижение напряжения на зажимах этих фаз переключением их в звезду;
б) при любом типе соединения фаз обмотки статора понизить напряжение можно с помощью реактора (трехфазной индуктивной катушки), включенного последовательно в обмотку статора. Менее экономично снижать напряжение на статоре последовательным включением резисторов, т.к. они при этом сильно нагреваются и возникают дополнительные потери электрической энергии;
в) для двигателей большой мощности снижать напряжение целесообразно при помощи понижающего трехфазного автотрансформатора. Этот способ лучше предыдущего, но значительно дороже. После того, как ротор двигателя разгонится, и ток спадает, на обмотку статора подается полное напряжение сети.
Пуск двигателя с фазным ротором осуществляется путем включения пускового реостата в цепь ротора. Пусковой реостат снижает величину начального пускового тока и одновременно увеличивает начальный пусковой момент, который может достигнуть величины, близкой к максимальному моменту. По мере разгона двигателя пусковой реостат выводят.
3) Регулирование частоты вращения и реверсирование асинхронного двигателя.
Регулирование – это принудительное изменение частоты вращения при постоянной нагрузке на валу. Недостатком асинхронных двигателей является плохая регулировочная способность. Но все же некоторые возможности регулирования имеются.
Из формулы скольжения можно получить выражение частоты вращения ротора асинхронного двигателя:

Из этого равенства
следует, что изменять частоту вращения
можно следующими способами: изменением
частоты тока статора
 ,
числа пар полюсов р и скольжения s.
Частоту вращения ротора можно регулировать
и изменением напряжения питания
,
числа пар полюсов р и скольжения s.
Частоту вращения ротора можно регулировать
и изменением напряжения питания .
Рассмотрим эти способы.
.
Рассмотрим эти способы.
Регулирование
изменением частоты тока статора
 .
Частотное регулирование асинхронных
двигателей является наиболее перспективным
в связи с наличием простых и надежных
трехфазных тиристорных преобразователей
частоты, которые включают между
промышленной сетью и асинхронным
двигателем. При регулировании частоты
.
Частотное регулирование асинхронных
двигателей является наиболее перспективным
в связи с наличием простых и надежных
трехфазных тиристорных преобразователей
частоты, которые включают между
промышленной сетью и асинхронным
двигателем. При регулировании частоты скорость двигателя можно плавно изменять
так, что ее максимальное значение будет
в десятки или сотни раз превышать
минимальные.
скорость двигателя можно плавно изменять
так, что ее максимальное значение будет
в десятки или сотни раз превышать
минимальные.
Регулирование изменением числа пар полюсов р . Переключение числа пар полюсов многоскоростных асинхронных двигателей обеспечивает ступенчатое регулирование частоты вращения ротора и отличается экономичностью. Оно применяется в машинах со специальным исполнением обмотки статора, допускающим переключение ее катушек на различное число пар полюсов, а также, когда в пазах магнитопровода статора размещено несколько поочередно включаемых обмоток, выполненных на разное число пар полюсов, например, р= 1 и р = 2.
Регулирование
изменением подводимого напряжения
.
Понижение напряжения вызывает снижение
скорости ротора. Уменьшать напряжение можно включением в цепь статора реостатов,
автотрансформаторов или регулируемых
дросселей. Данный метод применяется
только у двигателей малой мощности, так
как при уменьшении напряжения уменьшается
максимальный момент двигателя, который
пропорционален квадрату напряжения.
Снижение максимального момента уменьшает
запас по устойчивости работы двигателя.
Кроме того диапазон регулирования
частоты вращения сравнительно небольшой.
можно включением в цепь статора реостатов,
автотрансформаторов или регулируемых
дросселей. Данный метод применяется
только у двигателей малой мощности, так
как при уменьшении напряжения уменьшается
максимальный момент двигателя, который
пропорционален квадрату напряжения.
Снижение максимального момента уменьшает
запас по устойчивости работы двигателя.
Кроме того диапазон регулирования
частоты вращения сравнительно небольшой.
Перечисленные выше способы регулирования применяются для асинхронных двигателей с короткозамкнутым ротором.
У двигателей с фазным ротором частота вращения регулируется изменением скольжения. Для этого в обмотку ротора включают регулировочный реостат. При увеличении сопротивления регулировочного реостата скольжение увеличивается, а частота вращения уменьшается.
Этот способ обеспечивает плавное изменение частоты вращения.
Изменение направления вращения ротора называется реверсированием. Для реверса необходимо поменять местами два провода на зажимах статорной обмотки двигателя.