Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на валу n = f (M2). Так как при нагрузке момент холостого хода мал, то M2 ≈ M и механическая характеристика представляется зависимостью n = f (M). Если учесть взаимосвязь s = (n1 - n) / n1, то механическую характеристику можно получить, представив ее графическую зависимость в координатах n и М (рис. 1).
Обмотки статора. Однослойные и двухслойные волновые обмотки
Это приводит к повышению потерь в цепи ротора пропорционально скольжению. Поэтому этот способ используется при небольшом диапазоне управления скорости в пределах 2-4, а также для запуска механизмов и кратковременном снижению скорости. Способ нельзя лучше подходит для струйных механизмов, момент сопротивления которых зависит от квадрата скорости. Расширение диапазона управления до 5-10 и повышения жесткости характеристик осуществляется за счет замкнутой системы управления с обратной связью по скорости.
Рис. 1. Механическая характеристика асинхронного двигателя
Естественная механическая характеристика асинхронного двигателя соответствует основной (паспортной) схеме его включения и номинальным параметрам питающего напряжения. Искусственные характеристики получаются, если включены какие-либо дополнительные элементы: резисторы , реакторы , конденсаторы . При питании двигателя не номинальным напряжением характеристики также отличаются от естественной механической характеристики.
В этом случае обмотка статора двигателя питается от силового преобразователя частоты, который реализуется на транзисторах или тиристорах, рис. Жесткость механических характеристик на рабочем участке не меняется, потому что пропорциональном увеличению синхронной скорости соответствует пропорциональное уменьшение критического скольжения. Семейство искусственных механических характеристик представлено на рис.
Преимуществом способа является плавное изменение скорости при неизменной жесткости характеристик. Недостаток заключается в уменьшении перегрузочной способности двигателя и возможности управления скоростью только выше номинальной. Где К - коэффициент пропорциональности.
Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.
Основные точки механической характеристики: критическое сколь-жение и частота, максимальный момент, пусковой момент, номинальный момент.
Механическая характеристика - это зависимость вращающего момента от скольжения, или, иначе говоря, от числа оборотов:
Конструкция обмоток статора. Однослойные и двухслойные петле-вые обмотки
Отсюда следует основной закон частотного управления скоростью асинхронного двигателя, который еще называется законом Костенко. Согласно ему частота изменяется пропорционально изменению напряжения. Это обеспечивает неизменное значение критического момента и неизменный номинальный магнитный поток при широком диапазоне управления скоростью от нулю и до максимальной. Чаще всего в качестве максимальной выступает номинальная скорость, которой соответствует номинальное напряжение статора. Повышение напряжения выше номинальной ограничивается электрической стойкостью изоляции обмотки.
![]()
Из выражения  видно, что эта зависимость очень сложна, поскольку, как показывают формулы)
видно, что эта зависимость очень сложна, поскольку, как показывают формулы)  и
и  , скольжение входит также в выражения для I
2
и cos ? 2
. Механическая характеристика асинхронного двигателя дается обычно графически
, скольжение входит также в выражения для I
2
и cos ? 2
. Механическая характеристика асинхронного двигателя дается обычно графически
Семейство искусственных механических характеристик, которые имеют параллельные рабочие участки, представлены на рис. При низких скоростях падения напряжения в цепи статора, которое игнорируется при выводе закона управления, становится соизмеримым с напряжением питания статора, что приводит к уменьшению критического момента. Для исправления недостатка на низких скоростях напряжение нужно уменьшать в меньшей степени, чем по закону или с помощью замкнутой системы управления поддерживать неизменным соотношение ЭДС статора с частотой, чтобы согласно не менялся магнитный поток.
Начальная точка характеристики соответствует n = 0 и s = 1: это первое мгновение пуска двигателя. Величина пускового вращающего момента M n - очень важная характеристика эксплуатационных свойств двигателя. Если M n мал, меньше номинального рабочего момента, двигатель может запускаться только вхолостую или при соответственно сниженной механической нагрузке.
Для реализации способа управления чаще всего используются преобразователи частоты со звеном постоянного тока, которые состоит из управляемого выпрямителя, фильтра, автономного инвертора и систем управления выпрямителем, инвертором и электроприводом в целом, рис. Для небольших мощностей вместо управляемого выпрямителя используется неуправляемый, а с помощью АИ с системой широтно-импульсной модуляции одновременно регулируется и напряжение и частота.
АИ может быть источником напряжения или тока и в зависимости от этого существуют различные виды замкнутых систем управления скоростью асинхронного двигателя. Этот способ частотного управления скорости асинхронного двигателя является основным. Его преимуществом является плавное изменение скорости от нуля до максимальной при неизменной жесткости механической характеристики и перегрузочной способности двигателя. Он называется управление в первой зоне с постоянным моментом двигателя. Недостаток заключается в относительной сложности и повышенной стоимости преобразователя частоты.
Обозначим символом M np противодействующий (тормозной) момент, создаваемый механической нагрузкой на валу, при которой двигатель пускается. Очевидным условием для возможности запуска двигателя является: M n > M np . Если это условие выполнено, ротор двигателя придет в движение, число оборотов его n будет возрастать, а скольжение s уменьшаться. Как видно из изображения выше, вращающий момент двигателя при этом растет от M n до максимального M m , соответствующего критическому скольжению s kp , следовательно, растет и избыточная располагаемая мощность двигателя, определяемая разностью моментов M и M np .
Для струйных устройств, статический момент которых пропорционален квадрату скорости, наиболее экономичным является закон управления. При котором критический момент двигателя уменьшается пропорционально квадрату скорости, воспроизводя характер статического момента и уменьшая магнитный поток и потребления реактивной энергии, рис.
Основные точки механической характеристики: критическое сколь-жение и частота, максимальный момент, пусковой момент, номинальный момент
Для управления скоростью с обеспечением полной мощности двигателя, но с ослаблением магнитного потока и соответственно уменьшением критического момента двигателя применяется закон управления. При этом момент двигателя изменяется обратно пропорционально, а синхронная скорость пропорционально частоте, поэтому мощность, как их произведение остается неизменной. Семейство искусственных механических характеристик показано на рис. Напряжение выше номинальной не поднимается и при дальнейшем увеличении частоты она остается неизменной.
Чем больше разность между располагаемым моментом двигателя (возможным при данном скольжении по рабочей характеристике) М и противодействующим М np , тем легче режим запуска и тем быстрее двигатель достигает установившейся скорости вращения.
Как показывает механическая характеристика, при некотором числе оборотов (при s = s kp ) располагаемый вращающий момент двигателя достигает максимально возможного для данного двигателя (при данном напряжении U ) значения M т . Далее двигатель продолжает увеличивать скорость вращения, но располагаемый вращающий момент его быстро уменьшается. При каких-то значениях n и s вращающий момент двигателя становится равным противодействующему: пуск двигателя заканчивается, число оборотов его устанавливается на значении, соответствующем соотношению:
Рассмотрены частотные способы управления скоростью асинхронного двигателя являются наиболее распространенными. Развитие элементной базы силовой промэлектроники и внедрение микропроцессорных систем управления электроприводом существенно уменьшили стоимость и габариты преобразователей частоты, а также обеспечили высокое качество управления, обусловливает замену нерегулируемых асинхронных ЭП на регулируемые и вытеснение из отдельных отраслей ЭП постоянного тока.
Для управления скорости используются двигатели с фазным ротором, в цепь ротора которых подключается трехфазный реостат. Суммарный приведенный активный электрическое сопротивление цепи ротора равна. Отношение критических скольжений на искусственной и естественной характеристикам по формуле равна.
![]()
Это соотношение является обязательным для всех нагрузочных режимов двигателя, то есть для всех значений M np , не выходящих за пределы максимального располагаемого вращающего момента двигателя М т . В этих пределах двигатель сам автоматически приспосабливается ко всем колебаниям нагрузки: если во время работы двигателя его механическая нагрузка увеличивается, на какое-то мгновение M np станет больше момента, развиваемого двигателем. Обороты двигателя начнут снижаться, а момент увеличиваться.
Откуда находится критическое скольжение на искусственной характеристике для построения искусственных механических характеристик по формулам Клоса или. Это ограничивает диапазон управления на уровне 1, 5-2 для постоянного статического момента и 3-5 для момента вентиляторного типа. Включение дополнительного резистора в цепь ротора применяется при управлении скоростью двигателя за счет изменения напряжения статора для увеличения пускового момента.
Так как число пар полюсов может быть только целым: 1, 2, 3 и т.д. то скорость меняется ступенчато. Наиболее распространены двухскоростная двигатели, которые имеют одну обмотку статора разделенную на две части. Выводы каждой части обозначены, как начало и конец, например, а 1п и А 1к. Схема двойная звезда обеспечивает вдвое меньше пар полюсов, поэтому переключение с нее осуществляется на схемы звезда или треугольник.
Скорость вращения установится на новом уровне, отвечающем равенству M и M np . При снижении нагрузки процесс перехода к новому нагрузочному режиму будет обратным.
Если нагрузочный момент M np превысит М т , двигатель сразу остановится, так как с дальнейшим уменьшением оборотов вращающий момент двигателя уменьшается.
Для сохранения направления вращения двигателя необходимо при переключении на двойную звезду поменять местами любые два вывода обмотки статора. Кроме двухскоростная применяются также трех - и чотиришвидкистни двигатели. Трехскоростным двигатели имеют две обмотки статора, одна из них постоянно включена в сеть, а вторая переключается, как в рассмотренных двухскоростная.
Преимуществом способа является простота реализации, неизменная и высокая жесткость механических характеристик, высокая экономичность и надежность. Недостатком является изменение скорости только ступенчато и небольшой диапазон управления скоростью 2-6, который определяется количеством переключаемих полюсов. Двигатели имеют повышенные габариты и стоимость. Благодаря своим преимуществам двигатели применяются в ЭП вентиляторов, насосов, элеваторов, лифтов, станков, в цементной и нефтяной отраслях.
Поэтому максимальный момент двигателя М т называется еще опрокидывающим или критическим моментом.
Если в формулу момента ![]() подставить:
подставить:
В роторе двигателя выделяются потери, которые можно использовать для управления скоростью. Потери пропорциональны скольжению и в мощных двигателях, для которых применяется этот способ, достигают значительных величин. Управление скоростью осуществляется введением в цепь ротора дополнительной ЭДС, поэтому для реализации способа управления применяются двигатели с фазным ротором. В зависимости от использования энергии скольжения различаются электрические и электромеханические каскадные электроприводы.
В электрических каскадах энергия скольжения возвращается в сеть, а в электромеханических на вал асинхронного двигателя. По типу устройств преобразования энергии скольжения каскады разделяются на электромашинные, вентильно-машинные и вентильные. Электромашинные каскады в настоящее время не используются. Функциональная схема вентильно-машинного электромеханического каскада представлена на рис. Каскад состоит из основного асинхронного двигателя М1, обмотку статора которого включен в сеть. Оба двигателя связаны механическим валом, поэтому электромагнитный момент каскада равна сумме их моментов.
то получим:
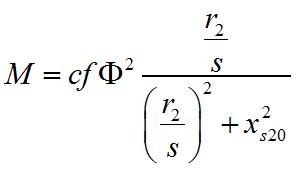
Взяв первую производную от М по и приравняв ее к нулю, найдем, что максимальное значение вращающего момента наступает при условии:
то есть при таком скольжении s = s kp , при котором активное сопротивление ротора равно индуктивному сопротивлению
Хд - приведенный к ротора индуктивное сопротивление фазы двигателя. Уравнения Кирхгофа для цепи ротора имеет вид. После подстановки в значение тока с с учетом ЭДС находится окончательное уравнение момента каскада. Согласно момент каскада увеличивается с увеличением магнитного потока Ф, а скорость уменьшается, рис. В области небольших нагрузок может возникнуть режим прерывистых токов, что приводит подъем механических характеристик. При отсутствии тока возбуждения И с механическая характеристика каскада приближается к естественной характеристики асинхронного двигателя, однако с увеличенным электрическим сопротивлением цепи ротора на величину сопротивления якоря ДПС и внутреннего сопротивления диодного моста.
![]()
Значения s kp у большинства асинхронных двигателей лежат в пределах 10 - 25%.
Если в написанную выше формулу момента вместо активного сопротивления r 2 подставить индуктивное по формуле
![]()
Асинхронный же двигатель создает на валу мощность. Которая с учетом возвращенной мощности остается неизменной, если пренебречь потерями. Таким образом, суммарная мощность поддерживается неизменной независимо от скольжения, поэтому вентильно-машинный электромеханический каскад называется каскадом с постоянной мощностью.
Недостаток заключается в большой установленной мощности двигателя постоянного тока, которая зависит от диапазона управления скоростью. Так при скольжении = 0, 5 мощность ГНС равна мощности АД, то есть ГНС может самостоятельно осуществить привод механизма, поэтому практический диапазон управления скоростью не превышает.
Максимальный вращающий момент асинхронного двигателя пропорционален квадрату магнитного потока (а значит, и квадрату напряжения) и обратно пропорционален индуктивности рассеяния обмотки ротора.
При постоянстве напряжения, подводимого к двигателю, его поток Ф остается практически неизменным.
В вентильно-машинных электрических каскадах ГНС не связан с АД, а приводит в движение синхронный генератор, который возвращает электрическую энергию в сеть. Каскад обеспечивает искусственные механические характеристики с постоянным моментом и неизменной высокой жесткостью характеристик, которая уступает только характеристикам при частотном управлении скорости. С развитием полупроводниковой техники машинные элементы каскада сменились на электронные. Наиболее распространенной является схема асинхронно-вентильного электрического каскада, рис.
Индуктивность рассеяния роторной цепи тоже практически постоянна. Поэтому при изменении активного сопротивления в цепи ротора максимальное значение вращающего момента M т изменяться не будет, но будет наступать при разных скольжениях (с увеличением активного сопротивления ротора - при больших значениях скольжения).
Очевидно, что максимум возможной нагрузки двигателя определяется значением его M т . Рабочая часть характеристики двигателя лежит в узком диапазоне чисел оборотов от n , соответствующего M т , до. При n = n 1 (конечная точка характеристики) М = 0, так как при синхронной скорости ротора s = 0 и I 2 = 0.
Номинальный вращающий момент, определяющий значение паспортной мощности двигателя, принимается обычно равным 0,4 - 0,6 от M т . Таким образом, асинхронные двигатели допускают кратковременные перегрузки в 2 - 2,5 раза.
Основным параметром, характеризующим режим работы асинхронного двигателя, является скольжение s - относительная разность частоты вращения ротора двигателя n и его поля n о: s = (n o - n) / n o .
Область механической характеристики, соответствующая 0 ≤ s ≤ 1 - область двигательных режимов, причем при s < s кр работа двигателя устойчива, при s > s кр - неустойчива. При s < 0 и s > 1 момент двигателя направлен против направления вращения его ротора (соответственно рекуперативное торможение и торможение противовключением).
Устойчивый участок механической характеристики двигателя часто описывается формулой Клосса , подстановкой в которую параметров номинального режима можно определить критическое скольжение s кр:
 ,
,
где: λ = M kp / M н - перегрузочная способность двигателя.
Механическая характеристика по данным справочника или каталога приближенно может быть построена по четырем точкам (рис. 7.1):
Точка 1 - идеальный холостой ход, n = n o = 60 f / p, М = 0, где: р - число пар полюсов магнитного поля двигателя;
Точка 2 - номинальный, режим: n = n н, М = М н = 9550 P н / n н, где P н - номинальная мощность двигателя в кВт;
Точка 3 - критический режим: n = n кр, М = М кр =λ М н;
Точка 4 - режим пуска: n = 0, М = М пуск = β М н.
При анализе работы двигателя в диапазоне нагрузок до М н и несколько больше устойчивый участок механической характеристики можно приближенно описать уравнением прямой линии n = n 0 - вМ, где коэффициент “в” легко определяется подстановкой в уравнение параметров номинального режима n н и М н.
Конструкция обмоток статора. Однослойные и двухслойные петле-вые обмотки.
По конструкции катушек обмотки подразделяют на всыпные с мягкими катушками и обмотки с жесткими катушками или полукатушками. Мягкие катушки изготовляют из круглого изолированного провода. Для придания требуемой формы их предварительно наматывают на шаблоны, а затем укладывают в изолированные трапецеидальные пазы (см. рис. 3.4, в , г и 3.5, в ); междуфазовые изоляционные прокладки устанавливают в процессе укладки обмотки. Затем катушки укрепляют в пазах с помощью клиньев или крышек, придают им окончательную форму (формируют лобовые части), осуществляют бандажирование обмотки и ее пропитку. Весь процесс изготовления всыпных обмоток можно полностью механизировать.
Жесткие катушки (полукатушки) изготовляют из прямоугольного изолированного провода. Окончательную форму им придают до укладки в пазы; одновременно на них накладывают корпусную и междуфазовую изоляцию. Затем катушки укладывают в предварительно изолированные открытые или полуоткрытые пазы , укрепляют и подвергают пропитке.
1. Однослойные обмотки - наиболее пригодны для механизированной укладки, так как в этом случае обмотка должна быть концентрической и укладываться в пазы статора обеими сторонами катушки одновременно. Однако применение их приводит к увеличенному расходу обмоточного провода из-за значительной длины лобовых частей. Кроме того, в таких обмотках не представляется возможным выполнить укорочение шага, что приводит к ухудшению формы магнит-ного поля в воздушном зазоре, увеличению добавочных потерь, возникновению провалов в механической характеристике и повышению шума. Однако из-за своей простоты и дешевизны такие обмотки широко применяют в асинхронных двигателях небольшой мощности до 10-15 кВт.
2. Двухслойные обмотки - позволяют выполнить укорочение шага обмотки на любое количество зубцовых делений, благодаря чему улучшается форма магнитного поля, создаваемого обмоткой, и подавляются высшие гармонические в кривой ЭДС. Кроме того, при двухслойных обмотках получается более простая форма лобовых соединений, что упрощает изготовление обмоток. Такие обмотки применяют для двигателей мощностью свыше 100 кВт с жесткими катушками, которые укладывают вручную.
Обмотки статора. Однослойные и двухслойные волновые обмотки
В пазах сердечника статора раз-мещается многофазная обмотка, которая подсоединяется к сети переменного тока. Многофазные симметричные обмотки с числом фаз т включают в себя т фазных обмоток, которые соединяются в звезду или многоугольник. Так, например, в случае трехфазной обмотки статора число фаз т = 3 и обмотки могут соединяться в звезду или треугольник. Между собой обмотки фаз смещены на угол 360/т град; для трехфазной обмотки этот угол равен 120°.
Обмотки фаз выполняются из отдельных катушек, соединенных последовательно, параллельно либо последовательно-параллельно. В данном случае под катушкой подразумеваются несколько последовательно соединенных витков обмотки статора, размещенных в одних и тех же пазах и имеющих общую изоляцию относительно стенок паза. В свою очередь витком считаются два активных (т. е. расположенных в самом сердечнике статора) проводника, уложенных в двух пазах под соседними разноименными полюсами и соединенных друг с другом последовательно. Проводники, расположенные вне сердечника статора и соединяющие активные проводники между собой, называются лобовыми частями обмотки. Прямолинейные части катушек обмоток, уложенные в пазы, называются сторонами катушек или пазовыми частями.
Пазы статора, в которые укладываются обмотки, образуют на внутренней стороне статора так называемые зубцы. Расстояние между центрами двух соседних зубцов сердечника статора, измеренное по его поверхности, обращенной к воздушному зазору, называется зубцовым делением или пазовым делением.
Многослойные цилиндрические катушечные обмотки (рисунок 3) наматываются из круглого провода и состоят из многослойных дисковых катушек, расположенных вдоль стержня. Между катушками (через каждую катушку или через две-три катушки) могут быть оставлены радиальные каналы для охлаждения. Такие обмотки применяются на стороне высшего напряжения при S ст ≤ 335 кВ×А, I ст ≤ 45 А и U л.н ≤ 35 кВ.
Однослойные и двухслойные цилиндрические обмотки (рисунок 4) наматываются из одного или нескольких (до четырех) параллельных прямоугольных проводников и применяются при S ст ≤ 200 кВ×А,I ст ≤ 800 А и U л.н ≤ 6 кВ.
(Документ)
n1.doc
Лекция 7.2.5. Механические характеристики двигателя постоянного тока с последовательным возбуждением. Двигательный режим
Схема включения двигателя приведена на рис. 2.8. Якорь двигателя М и обмотка возбуждения LM включены последовательно и получают питание от одного источника U. Поэтому ток якоря I
я
является и током возбуждения I
в
. Это обстоятельство определяет единственное отличие в конструкции двигателя с последовательным возбуждением от двигателя с независимым возбуждением: обмотка возбуждения LM ДПТ с последовательным возбуждением выполнена проводником того же сечения, что и обмотка якоря.
Рис. 2.8. Схема включения ДПТ с последовательным возбуждением.
При вращающемся якоре в его обмотке наводится э.д.с. вращения Е . На схеме включения двигателя направление Е встречно по отношению направления U , что соответствует двигательному режиму работы. Величина Е равна:
Где ?
– угловая скорость двигателя; Ф
– поток двигателя;  - конструктивный коэффициент двигателя данные для расчета, которого приводятся в справочниках. Здесь р
– число пар полюсов двигателя; N
– число активных проводников обмотки якоря; а
– число пар параллельных ветвей обмотки якоря.
- конструктивный коэффициент двигателя данные для расчета, которого приводятся в справочниках. Здесь р
– число пар полюсов двигателя; N
– число активных проводников обмотки якоря; а
– число пар параллельных ветвей обмотки якоря.
Направление якорного тока I Я , как и направление Е на схеме включения показано для двигательного режима работы.
Допустимое значение якорного тока двигателя I я доп ограничивается условиями коммутации и механической прочностью якоря и не должно превышать номинальный ток I ян более чем в 2,5 раза I я доп ? 2,5 I ян .
В соответствии с уравнением равновесия напряжений при установившемся режиме работы двигателя напряжение U, приложенное к якорной цепи двигателя уравновешивается падением напряжения в якорной цепи I я R яц и наведенной в обмотке якоря э.д.с. вращения Е :
U= I Я R ЯЦ + Е
Где R ЯЦ =R Я +R ДП +R КО +R В +R П – суммарное сопротивление якорной цепи. Здесь R Я - сопротивление обмотки якоря; R ДП – сопротивление обмотки дополнительных полюсов; R КО – сопротивление компенсационной обмотки; R В – сопротивление обмотки возбуждения; R П – сопротивление пускового реостата.
Величина I Я в установившемся режиме будет равна:
В режиме пуска Е=0 , поэтому из-за небольшого сопротивления обмоток пусковой ток I Я П может превышать допустимое значение. Для ограничения пускового тока служит пусковой реостат, сопротивление которого R П выбирается таким образом, чтобы I Я П ? I Я ДОП
Из уравнения равновесия напряжений для якорной цепи можно получить аналитическое выражение для механической характеристики двигателя.
Подставив в него вместо э.д.с. вращения Е ее значение и решив полученное уравнение относительно скорости, получим зависимость скорости двигателя ? от тока якоря I Я ?=f(I Я ) , которая называется электромеханической характеристикой:
Поскольку обмотка возбуждения включена последовательно с якорем двигателя, создаваемый ею магнитный поток Ф является функцией тока якоря I Я . Зависимость Ф= f(I Я ) называется кривой намагничивания и носит нелинейный характер типа «зона насыщения». Точного аналитического описания этой кривой не существует, поэтому нет и точного аналитического описания механической характеристики ДПТ с последовательным возбуждением. Если, пренебрегая насыщением магнитной системы, предположить линейную зависимость между Ф и I Я с коэффициентом пропорциональности?, то есть считать Ф=?I Я , то вращающий момент будет равен:
М=kФI Я =k?I Я 2
Отсюда величина тока якоря будет равна:
Подставив в уравнение электромеханической характеристики значение для I я , получим уравнение механической характеристики:
Где А=U/k?; В= R ЯЦ /(k?) – постоянные величины.
Анализ полученного уравнения показывает, что ось ординат является асимптотой для кривой и что в области малых значений моментов она имеет большую крутизну
При R П =0 и U=U н двигатель работает на естественной характеристике. Для построения естественной характеристики используются так называемые универсальные характеристики, приводимые в каталогах для каждой серии двигателей. Они представляют зависимости n=f(I Я ) и М= f(I Я ) в относительных единицах. Зная номинальные данные двигателя, можно построить его характеристику в абсолютных величинах. Такая характеристика приведена на рис. 2.9.
Рис. 2.9. Механические характеристики двигателя постоянного тока последовательного возбуждения.
Особенностью характеристики является резкое увеличение скорости при уменьшении момента сопротивления М
с
. По этому двигатель постоянного тока с последовательным возбуждением нельзя запускать в тех случаях, когда М
с
н
, так как скорость двигателя может превышать допустимое значение ?
доп
=2,5 ?
н
. Пояснить эту особенность можно, рассмотрев процессы, протекающие в двигателе при уменьшении нагрузки. Допустим, что двигатель работал в точке А на естественной характеристике (см. рис. 2.9.) в установившемся режиме со скоростью ?
1
. При уменьшении момента сопротивления от величины М
с1
например, до величины М
с2
, появляется положительный динамический момент М
Д
>0
и скорость двигателя начинает увеличиваться. При независимом возбуждении следствием этого будет увеличение э.д.с. вращения  и уменьшение тока якоря
и уменьшение тока якоря  и вращающего момента
и вращающего момента ![]() . Увеличение скорости и уменьшение момента двигателя будет продолжаться до тех пор, пока момент двигателя М
на станет равным М
с2
и М
Д
станет равным нулю.
. Увеличение скорости и уменьшение момента двигателя будет продолжаться до тех пор, пока момент двигателя М
на станет равным М
с2
и М
Д
станет равным нулю.
При последовательном возбуждении э.д.с. вращения Е оказывается функцией двух величин – увеличивающейся скорости ? и уменьшающегося потока Ф . В результате этого величина Е , а значит и величины I Я и М , с ростом скорости существенно изменятся не будет, что приводит к сохранению М Д >0 и дальнейшему росту скорости. Если сопротивление пускового реостата R П >0 , то статическое падение скорости ?? с при одном и том же моменте двигателя будет больше, чем на естественной характеристике. Поэтому реостатные характеристики будут иметь большой наклон к оси абсцисс.
При последовательном возбуждении вращающий момент пропорционален квадрату тока якоря  и ограничение пускового тока значением I
Я ДОП
?2,5I
ЯН
позволяет получить гораздо больше чем при независимом возбуждении значение М
ДОП
=5 М
Н
. Коэффициент перегрузки двигателя постоянного тока с последовательным возбуждением по моменту
и ограничение пускового тока значением I
Я ДОП
?2,5I
ЯН
позволяет получить гораздо больше чем при независимом возбуждении значение М
ДОП
=5 М
Н
. Коэффициент перегрузки двигателя постоянного тока с последовательным возбуждением по моменту
K
П
= М
ДОП
/М
Н
равен пяти. Такой перегрузочной способностью не обладает больше не один электрический двигатель. Именно благодаря этому свойству двигатели с последовательным возбуждением используются в электрическом транспорте и подъемных механизмах.
Лекция 8.
2.6. Механические характеристики двигателя постоянного тока с последовательным возбуждением. Режим электрического торможения.
Возможны два режима электрического торможения: динамическое торможение и торможение противовключением. Рекуперативное торможение осуществить не возможно, так как э.д.с. вращения Е
не может быть больше напряжения якорного источника U
.
Динамическое торможение осуществляется двумя способами: с самовозбуждением и с независимым возбуждением. Схема включения двигателя и механические характеристики для первого случая приведены на рис. 2.10.
Рис. 2.10. а) схема включения двигателя в режиме динамического торможения с самовозбуждением;
Б) характеристики двигателя в режиме динамического торможения с самовозбуждением.
Двигатель отключен от напряжения источника, а обмотка возбуждения переключена таким образом, чтобы направление тока I В в ней было таким же как а в двигательном режиме (см. рис. 2.8). Это сохранение направления тока исключает уничтожение малого остаточного потока, связанного с намагничиванием статора двигателя. Этот поток и является причиной самовозбуждения: в обмотке якоря, вращающегося под действием инерционных сил в прежнем направлении, наводится э.д.с. Е , направление которой такое же, как и в двигательном режиме. Под действием Е в контуре динамического торможения появляется ток, что приводит к увеличению потока Ф, э.д.с. Е и тока I Я . Поскольку ток I Я по отношению к двигательному режиму имеет противоположное направление, момент двигателя становится тормозным. Двигатель из точки А в первом квадранте переходит в точку В или С на характеристике динамического торможения во втором квадранте. Вначале процесс самовозбуждения проходит очень интенсивно и это приводит к броску тормозного момента, способного вызвать удары в механической части привода. Поэтому чаще применяют динамическое торможение с независимым возбуждением. Схема включения двигателя и механические характеристики приведены на рис. 2.11.
Рис. 2.11. а) схема включения двигателя в режиме динамического
Торможения с независимым возбуждением;
Б) характеристики двигателя в режиме динамического
Торможения с независимым возбуждением.
Зажимы якоря двигателя закорачиваются на сопротивление динамического торможения R
ДТ
, а обмотка возбуждения подключается к напряжению источника через сопротивление R
В
.
Ток в ней направлен как и в двигательном режиме и устанавливается равным номинальному. Характеристики аналогичны характеристикам ДПТ с независимым возбуждением: они линейны, расположены во втором квадранте и проходят через начало координат.
Торможение противоключением , как и для ДПТ с независимым возбуждением, осуществляется в том случае, когда обмотки двигателя включены для одного направления вращения, а якорь двигателя под воздействием сил инерции или активного момента сопротивления вращается в противоположную сторону – против включения.
Реверсивная схема включения ДПТ с последовательным возбуждением приведена на рис. 2.12.
Рис. 2.12. Реверсивная схема включения ДПТ с последовательным возбуждением.
Назначение элементов такое же, как и на схеме рис. 2.5. При реверсе двигателя со стороны якоря направление тока в обмотке возбуждения LM сохраняется. Поэтому все процессы при торможении аналогичны происходящим в схеме рис. 2.5. Характеристики двигателя приведены на рис. 2.13.
Рис. 2.13.а) характеристики ДПТ с последовательным возбуждением в режиме торможения противоквлючением.
Б) аналогичные характеристики при активном М с.
Лекция 9.
2.7. Механические характеристики асинхронных двигателей. Двигательный режим.
Асинхронные двигатели (АД) – самый распространенный вид двигателей, т.к. они более просты и надежны в эксплуатации, при равной мощности имеют меньшую массу, габариты и стоимость в сравнении с ДПТ. Схемы включения АД приведены на рис. 2.14.
До недавнего времени АД с короткозамкнутым ротором применялись в нерегулируемых электроприводах. Однако с появлением тиристорных преобразователей частоты (ТПЧ) напряжения, питающего статорные обмотки АД, двигатели с короткозамкнутым ротором начали использоваться в регулируемых электроприводах. В настоящее время в преобразователях частоты применяются силовые транзисторы и программируемые контроллеры. Способ регулирования скорости получил название импульсного и его совершенствование является важнейшим направлением в развитии электропривода.
Рис. 2.14. а) схема включения АД с короткозамкнутым ротором;
Б) схема включения АД с фазным ротором.
Уравнение для механической характеристики АД может быть получено на основании схемы замещения АД. Если в этой схеме пренебречь активным сопротивлением статора, то выражение для механической характеристики будет иметь вид:
 ,
,
где  ;
;  .
.
Здесь М к – критический момент; S к - соответствующее ему критическое скольжение; U ф – действующее значение фазного напряжения сети; ? 0 =2?f/p – угловая скорость вращающегося магнитного поля АД (синхронная скорость); f – частота питающего напряжения; p – число пар полюсов АД; х к – индуктивное фазное сопротивление короткого замыкания (определяется из схемы замещения); S=(? 0 -?)/? 0 – скольжение (скорость ротора относительно скорости вращающегося поля); R 2 1 – суммарное активное сопротивление фазы ротора.
Механическая характеристика АД с короткозамкнутым ротором приведена на рис. 2.15.
Рис. 2.15. Механическая характеристика АД с короткозамкнутым ротором.
На ней можно выделить три характерные точки. Координаты первой точки (S=0; ?=? 0 ; М=0 ). Она соответствует режиму идеального холостого хода, когда скорость ротора равна скорости вращающегося магнитного поля. Координаты второй точки (S=S к ; М=М к ). Двигатель работает с максимальным моментом. При М с >М к ротор двигателя будет принудительно остановлен, что для двигателя является режимом короткого замыкания. Поэтому вращающий момент двигателя в этой точке и называется критическим М к . Координаты третьей точки (S=1; ?=0; М=М п ). В этой точке двигатель работает в режиме пуска: скорость ротора?=0 и на неподвижный ротор действует пусковой момент М п . Участок механической характеристики, расположенный между первой и второй характерными точками, называется рабочим участком. На нем двигатель работает в установившемся режиме. У АД с короткозамкнутым ротором при выполнении условий U=U н и f=f н механическая характеристика называется естественной. В этом случае на рабочем участке характеристики расположена точка, соответствующая номинальному режиму работы двигателя и имеющая координаты (S н ; ? н ; М н ).
Электромеханическая характеристика АД ?=f(I ф ) , которая на рис.2.15 изображена штриховой линией, в отличие от электромеханической характеристики ДПТ, совпадает с механической характеристикой только на ее рабочем участке. Это объясняется тем, во время пуска из-за изменяющейся частоты э.д.с. в обмотке ротора Е 2 изменяется частота тока и соотношение индуктивного и активного сопротивлений обмотки: в начале пуска частота тока большая и индуктивное сопротивление больше активного; с увеличением скорости вращения ротора ? частота тока ротора, а значит и индуктивное сопротивление его обмотки, уменьшается. Поэтому пусковой ток АД в режиме прямого пуска в 5ч7 раз превышает номинальное значение I фн , а пусковой момент М п равен номинальному М н . В отличии от ДПТ, где при пуске необходимо ограничивать пусковой ток и пусковой момент, при пуске АД пусковой ток необходимо ограничивать, а пусковой момент увеличивать. Последнее обстоятельство наиболее важно, поскольку ДПТ с независимым возбуждением запускается при М с н , ДПТ с последовательным возбуждением при М с н , а АД при работе на естественной характеристике при М с н .
У АД с короткозамкнутым ротором увеличение М п обеспечивается специальной конструкцией обмотки ротора. Паз для обмотки ротора делают глубоким, а саму обмотку располагают в два слоя. При пуске двигателя частота Е 2 и токи ротора большие, что приводит к появлению эффекта вытеснения тока – ток протекает только в верхнем слое обмотки. Поэтому увеличивается сопротивление обмотки и пусковой момент двигателя М П . Его величина может достигать 1,5М н .
У АД с фазным ротором увеличение М П обеспечивается за счет изменения его механической характеристики. Если сопротивление R П , включенное в цепь протекания тока ротора, равно нулю – двигатель работает на естественной характеристике и М П =М Н . При R П >0 увеличивается суммарное активное сопротивление фазы ротора R 2 1 . Критическое же скольжение S к по мере увеличения R 2 1 тоже увеличивается. Вследствие этого у АД с фазным ротором введение R П в цепь протекания тока ротора приводит к смещению М К в сторону больших скольжений. При S К =1 М П =М К . Механические характеристики АД с фазным ротором при R П >0 называются искусственными или реостатными. Они приведены на рис. 2.16.
Рис. 2.16. Механические характеристики АД с фазным ротором.
Асинхронный двигатель с короткозамкнутым ротором запустится при М п >М с и будет работать в точке А (см. рис. 2.15). После этого момент сопротивления М с можно увеличивать до М К . АД, как и двигатели постоянного тока, при увеличении М с будет автоматически, без вмешательства извне, снижать скорость ? и увеличивать вращающий момент М до тех пор, пока М и М с не сравняются по величине, т.е. из установившегося режима с большей скоростью переходить в установившийся режим с меньшей скоростью. При уменьшении М с будет наблюдаться обратное – двигатель из установившегося режима с меньшей скоростью будет автоматически переходить в установившийся режим с большей скоростью. Рабочий участок механической характеристики АД аналогичен механической характеристике ДПТ с независимым возбуждением – прямая линия, наклоненная к оси абсцисс.
Такими свойствами АД обладает благодаря э.д.с. Е 2 , которая наводится вращающимся магнитным полем статора в обмотке ротора. При М с >М динамический момент М д и скорость ротора ? уменьшается. Магнитное поле статора, вращающееся с постоянной скоростью ? 0 (синхронной скоростью) будет пересекать обмотку ротора с большой частотой. Поэтому будет увеличиваться Е 2 , ток в обмотке ротора, сила Ампера, действующая на ее витки, а значит и вращающий момент М .
Перегрузочная способность АД по моменту определяется отношением критического момента М
К
к моменту номинальному М
Н
. Для обычных АД с короткозамкнутым ротором М
К
/М
Н
=1,7
, с фазным ротором М
К
/М
Н
=1,8
. Для специальных крановых АД с короткозамкнутым ротором типа МТК и фазным ротором типа МТКФ отношение М
К
/М
Н
=2,3ч3,4
.
Лекция 10.
2.8. Механические характеристики асинхронных двигателей. Режим электрического торможения.
Асинхронный двигатель, как и двигатель постоянного тока с независимым возбуждением, может работать во всех трех режимах электрического торможения.
Рекуперативное торможение. Возврат энергии в сеть возможен при скорости ротора? выше синхронной скорости ? 0 . По мере приближения ? к ? 0 уменьшается величина Е 2 , ток в обмотке ротора и вращающий момент двигателя М. Увеличение ? до значений, больших ? 0 возможно под влиянием М с , способствующего вращению двигателя. В данном случае АД работает как генератор, включенный параллельно с сетью: занесенную в движущихся элементах механической части электропривода механическую энергию он преобразует в электрическую и возвращает ее в сеть. Применяется режим рекуперативного торможения в электроприводах подъемных лебедок различных грузоподъемных машин. Реверсивная схема включения АД с фазным ротором приведена на рис. 2.17а, а соответствующие ей характеристики АД для режима рекуперативного торможения – на рис. 2.17б.
Реверсировать АД, в отличие от ДПТ, можно только одним способом – изменением порядка чередования фаз напряжения, питающего статорные обмотки двигателя. Для этого используют два трехполюсных контактора (в электроприводах малой и средней мощности – магнитных пускателя), конструкция которых имеет механическую блокировку, исключающую возможность одновременного срабатывания контакторов. На рис. 2.17а показаны главные контакты контакторов направления КВ (вперед или верх) и КН (назад или низ).
При замкнутых КВ статорные обмотки АД подключены к сети с прямым порядком чередования фаз – вывод С1 статорных обмоток к напряжению фазы А, вывод С2 – фазы В и вывод С3 – фазы С. Вращающееся магнитное поле и ротор двигателя вращаются в направлении «вперед».
При разомкнутых КВ и замкнутых КН вывод С1 будет подключен к напряжению фазы С, вывод С2 останется подключенным к напряжению фазы В, а вывод С3 будет подключен к напряжению фазы А. прямой порядок чередования фаз (А, В, С)изменяется на обратный (С, В, А). В результате этого изменяется направление вращения поля и ротора двигателя.
Поднятый груз создает активный момент сопротивления М с , направление которого не изменяется при изменении направления вращения двигателя (см. рис. 2.17б). Поэтому при замыкании КН и включении двигателя в направлении опускания груза ротор двигателя будут раскручивать как вращающий момент сопротивления М с . Уравнение движения электропривода будет иметь вид:
 .
.
Рис. 2.17.а) реверсивная схема включения АД с фазным ротором;
Б) механические характеристики АД с фазным ротором в режиме рекуперативного торможения.
Скорость вращения двигателя, а значит и скорость опускания груза, будет увеличиваться. При ?=? 0 вращающий момент М=0 и уравнение движения примет вид:
 .
.
Скорость двигателя будет расти под действием активного М с . Когда скорость ротора превысит скорость вращающегося поля (?>? 0 ), момент двигателя изменит направление и станет тормозным, а уравнение движения электропривода будет иметь вид:
 .
.
Поскольку схема включения двигателя не изменяется, механические характеристики АД для режима рекуперативного торможения (как и для ДПТ с независимым возбуждением) получаются продолжением характеристик для двигательного режима в третьем квадранте в четвертый.
С увеличением скорости двигателя будет расти величина тормозного момента М. При работе двигателя на естественной характеристике М станет равным М с при скорости (–? 1 ) и двигатель перейдет в установившийся режим работы. Груз будет опускаться с постоянной скоростью. На реостатных характеристиках скорость установившегося режима будет больше – (–? 2 ) на пусковой характеристике.
Торможение противоключением , как и для ДПТ с независимым возбуждением, осуществляется в том случае, когда обмотки двигателя включены для одного направления вращения, а ротор двигателя под воздействием сил инерции или активного момента сопротивления вращается в противоположную сторону – против включения.
Допустим, что на рис. 2.17а замкнуты контакты КВ, а R П и R ПР зашунтированы. Статорные обмотки подключены к напряжению сети с прямым порядком чередования фаз.
Размыкаются контакты КВ и замыкаются КН. Работающий двигатель включается на противоположное направление. Статорные обмотки двигателя подключаются к сети с обратным порядком чередования фаз. Изменяется направление вращения магнитного поля статора, а ротор двигателя под действием инерционных сил сохраняет направление вращения – вращается против включения. Изменяет направление вращающий момент двигателя, т.е. он становится тормозным.
Поскольку ротор двигателя вращается навстречу полю, частота, с которой вращающееся поле пересекает обмотку ротора, в два раза превышает частоту при пуске (ротор неподвижен, а поле вращается с синхронной скоростью ? 0 ). Наводимая в обмотке ротора э.д.с. Е 2 в два раза превышает номинальную э.д.с. Е 2н , наводимую в обмотке ротора при пуске. Поэтому для ограничения тока в цепь ротора необходимо кроме пускового сопротивления R П включать сопротивление противовключения R ПР . Механические характеристики двигателя, соответствующие схеме включения на рис. 2.17а, приведены на рис. 2.18. При замкнутых КВ и зашунтированных R П и R ПР двигатель работал на естественной характеристике в точке А. После размыкания КВ, включения в цепь ротора R П +R ПР и замыкания КН двигатель из точки А переходит в точку В на характеристике торможения противовключением. Под действием тормозного момента скорость двигателя будет снижаться. Если двигатель тормозится для остановки, то в точке С при ?=0 необходимо разомкнуть КН.
Рис. 2.18. Механические характеристики АД с фазным ротором в режиме торможения противовключением.
Если же после остановки начинается разгон в противоположном направлении, то при скорости близкой к нулю необходимо зашунтировать R ПР и перевести двигатель на предельную пусковую характеристику. На этой характеристике двигатель закончит торможение и сразу же начнет разгон в противоположном направлении с максимальным ускорением. В третьем квадранте он может работать в установившемся режиме в точке Д на пусковой характеристике или в точке Е на естественной. Если разомкнуть КН, включить в цепь ротора R П +R ПР и замкнуть КВ двигатель
Из точки Е перейдет в точку F на характеристике противовключения в четвертом квадранте. Процесс торможения и разгон будут проходить аналогично.
При реверсивной схеме включения АД с короткозамкнутым ротором у двигателя будут две естественных характеристики (см. рис. 2.17б) в первом и третьем квадрантах. Для получения характеристик торможения противовключением естественные характеристики следует продлить во второй и четвертый квадранты. Процессы торможения и разгона будут протекать аналогично рассмотренным для АД с фазным ротором. Однако нагрев двигателя будет намного большим, т.к. ограничение тока ротора отсутствует.
В электроприводах с активным М с, например, в электроприводе подъемной лебедки, где активный М с создает груз массой m, подвешенный на крюке, режим торможения противключением можно получить за счет изменения механической характеристики двигателя. Схема включения двигателя приведена на рис. 2.17а, а механические характеристики двигателя на рис. 2.19.
Допустим, что замкнуты КВ и зашунтированы R П и R ПР . Двигатель со скоростью ? 1 работает в направлении подъема на естественной характеристике в точке А.
При введении в цепь ротора пускового реостата R
П
двигатель перейдет на предельную пусковую характеристику и будет работать в точке В со скоростью ?
2
.С введением R
ПР
наклон характеристики будет увеличиваться, а скорость движения уменьшается (?=?
3
при R
ПР
= R
ПР1
).
Рис. 2.19. Механические характеристики АД с фазным ротором в режиме торможения противовключением при активном М с.
Можно так подобрать величину R ПР , что М будет равен М с при скорости двигателя ? , равной нулю. На рис. 2.19 этому случаю соответствует точка Д при R ПР = R ПР2 . Двигатель останавливается и поднимаемый груз удерживается в подвешенном состоянии за счет вращающего момента двигателя М . При
R ПР = R ПР3 момент двигателя М станет меньше М с . Поднятый груз начнет опускаться и двигатель, включенный для работы на подъем, под действием активного М с будет вращаться в направлении опускания – против включения. Момент двигателя становится тормозным. С увеличением скорости опускания груза он будет увеличиваться. При ?=-? 4 (точка Е на рис. 2.19) величина тормозного момента двигателя М станет равной величине активного М с . Двигатель перейдет в установившийся режим работы и увеличение скорости опускания груза прекратится. Такой режим торможения широко используется в электроприводах подъемных лебедок, так как он позволяет получить очень низкие «посадочные» скорости двигателя и устанавливать груз в требуемом месте без удара.
При торможении противовключением АД работает в режиме генератора, включенного последовательно с сетью. Он преобразует механическую энергию в электрическую, а также потребляет электрическую энергию из сети. Вся электроэнергия выделяется в виде тепла в двигателе и на сопротивлениях, включенных в цепи протекания тока ротора. Поэтому торможение противовключением не экономично с точки зрения затрат энергии, однако по сравнению с другими видами оно обеспечивает минимальное время торможения.
Динамическое торможение осуществляется при отключении обмоток статора от сети переменного тока и подключении двух из них к сети постоянного тока. Схема включения двигателя приведена на рис. 2.20а, механические характеристики – на рис. 2.20б.
При замкнутых КЛ и разомкнутых КДТ и зашунтированном R ДТ двигатель работает в первом квадранте на естественной характеристике в точке А.
При размыкании КЛ и замыкании КДТ выводы С2 и С3 статорных обмоток подключается к сети постоянного тока. Постоянный ток, протекая к обмотке статора, образует неподвижное магнитное поле. В обмотке вращающегося ротора наводится э.д.с., под действием которой протекает переменный ток. Создаваемое этим током поле неподвижно относительно статора. Тормозной момент возникает в результате взаимодействия суммарного магнитного потока с током ротора.
Двигатель из точки А перейдет в точку В на одной из характеристик динамического торможения, которые расположены во втором квадранте. Они проходят через начало координат, так как при ?=0 э.д.с. ротора, ток ротора и тормозной момент двигателя тоже будут равны нулю.
В режиме динамического торможения двигатель работает как автономный генератор. Механическую энергию, запасенную в движущихся элементах механической части он преобразовывает в электрическую и расходует ее на нагрев обмоток и дополнительных сопротивлений в цепи ротора.
Рис. 2.20. а) схема включения АД с фазным ротором в режиме динамического торможения;
Б) механические характеристики АД с фазным ротором в режиме динамического торможения.
Лекция 11.
2.9. Механические и энергетические характеристики синхронных двигателей.
Синхронные трехфазные двигатели (СД) широко применяются в электроприводах самых разнообразных технологических машин. Схема включения СД приведена на рис. 2.21а, механические характеристики на рис. 2.21б.
Рис. 2.21. а) схема включения синхронного двигателя;
Б) механические характеристики синхронного двигателя в режимах пуска и синхронного вращения.
Статор СД выполнен аналогично статору АД - три статорных обмотки расположены на статоре таким образом, что оси создаваемых ими потоков сдвинуты в пространстве на 120 0 . Подключение начал обмоток статора, которые на рис. 2.21а обозначены как С1, С2, С3, к трехфазной сети переменного тока со сдвигом напряжения между фазами на 120 электрических градусов приводит к появлению магнитного поля, вращающегося с синхронной скоростью ? 0 =2?f 1 /p . Здесь p – число пар полюсов статорных обмоток СД; f 1 – частота питающей сети. При p=1 вращающееся поле представляет собой два диаметрально противоположно расположенных разноименных полюса северного (N) и южного (S), которые и вращаются со скоростью ? 0 .
Ротор СД выполняется с двумя обмотками: обмоткой возбуждения и короткозамкнутой пусковой обмоткой в виде «беличьей клетки». Обмотка возбуждения питается напряжением постоянного тока и при протекании в ней тока она превращается в электромагнит постоянного тока, разноименные полюса которого в зависимости от скорости вращения могут выполняться как явными, так и неявными, т.е. обмотка возбуждения распределяется по наружной поверхности ротора.
При неподвижном роторе разноименные полюса вращающегося поля статора и ротора не успевают притянуться. Вращающий момент двигателя равен нулю, а в обмотке возбуждения полем статора наводится столь большая э.д.с., что может наступить пробой изоляции обмотки возбуждения.
Для того, чтобы разноименные полюса статора и ротора притянулись (вошли в синхронизм) и при этом не появлялись существенно превышающие номинальные значения броски тока, ротор СД необходимо разогнать до подсинхронной скорости ? П , которая равна ? П =0,95? 0 . Для этого предназначена пусковая короткозамкнутая обмотка, т.е. СД запускается как АД с короткозамкнутым ротором. Пусковые характеристики АД при различных вариантах пусковой обмотки приведены на рис. 2.21б
У характеристики 1 пусковой момент М П1 меньше пускового момента характеристики 2 - М П2 , однако момент вхождения в синхронизм МВ 1 больше МВ 2 . Выбор вида пусковой характеристики определяется конкретными условиями работы СД. Обмотка возбуждения СД при пуске закорачивается на разрядное сопротивление, что защищает ее изоляцию от перенапряжений. К источнику напряжения постоянного тока она подключается после того, как скорость ротора ? достигнет подсинхронной ? П .
Пусковая обмотка СД во время пуска интенсивно нагревается, поэтому время тока СД ограничено.
После вхождения СД в синхронизм его скорость при изменении величины момента сопротивления на валу до некоторого максимального значения М макс остается постоянной и равной скорости вращающегося магнитного поля – синхронной скорости ? 0 . Поэтому его механическая характеристика, приведенная на рис. 2.21б, имеет вид прямой, параллельной оси абсцисс. Если М с превышает М макс , то СД может выпасть из синхронизма.
Для определения максимального момента СД М макс , до которого сохраняется синхронная работа СД, служит угловая характеристика СД. Она отражает зависимотсь вращающего момента М от внутреннего угла СД ? , представляющего собой угол сдвига между осью магнитного поля статора и осью поля ротора. Момент СД представляет собой синусоидальную функцию угла ? – М=М макс sin? . Максимального значения вращающий момент СД достигает при ?=?/2 . При бо льших значениях ? величина вращающего момента двигателя уменьшается и поэтому двигатель выпадает из синхронизма. Номинальному моменту двигателя М ном соответствует номинальный угол ? ном =25 0 ч30 0 . При таком значении ? ном коэффициент перегрузки СД по моменту к П =М макс /М ном =2ч2,5.
Синхронный двигатель может работать во всех режимах электрического торможения. Наиболее часто используется режим динамического торможения. Для его реализации обмотки статора СД отключают от сети и закорачивают на сопротивление динамического торможения R ДТ , а обмотка возбуждения продолжает питаться постоянным током. Механические характеристики СД аналогичны характеристикам АД при динамическом торможении (см. рис. 2.20б).
Торможение противовключением используется редко из-за того, что перевод СД в этот режим сопровождается значительными бросками тока и требует применения сложных схем управления.
Работа системы электроснабжения характеризуется потреблением электроприемниками реактивной мощности. Это вызывает дополнительные потери энергии в элементах системы, снижение уровня напряжения и необходимость иметь повышенную пропускную способность подстанций и распределительных сетей, что снижает экономичность работы системы. В связи с этим для улучшения показателей работы системы электроснабжения необходимо производить компенсацию реактивной мощности, что может осуществляться несколькими способами.
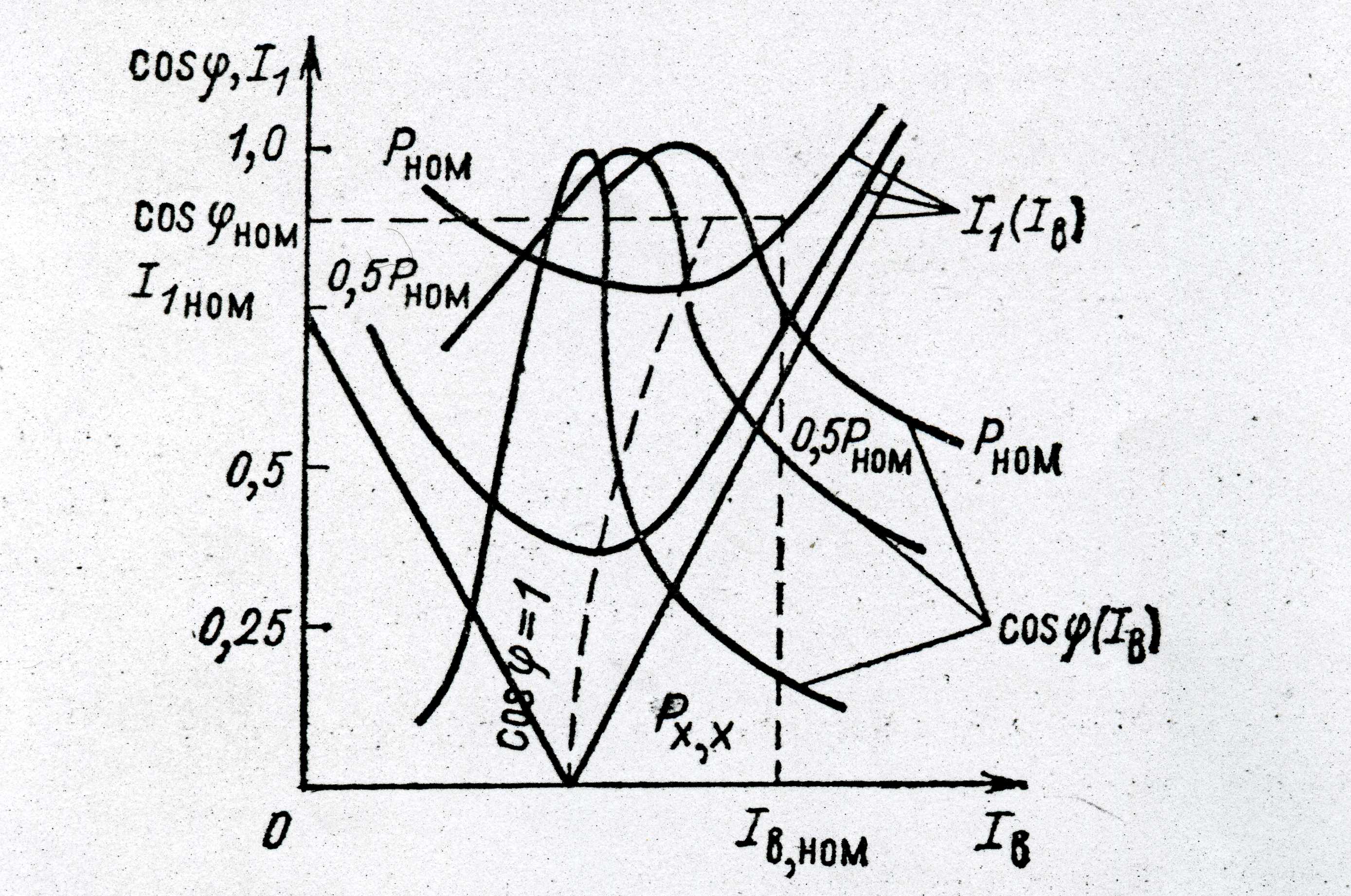
Рис. 2.22. U-образные характеристики СД.
Один из эффективных способов компенсации реактивной мощности связан с использованием СД, который за счет регулирования тока возбуждения может осуществлять генерацию реактивной мощности в электрическую сеть. В этом случае СД работает с опережающим коэффициентом cos ?
. Возможность работы СД в качестве компенсатора реактивной мощности иллюстрируют U-образные характеристики СД, приведенные на рис. 2.22. Эти характеристики показывают зависимости тока статора I
1
и его cos ?
от тока возбуждения I
В
при U=const
и Р=const
.
Характеристики I 1 (I В ) показывают, что при увеличении от нуля тока возбуждения ток статора вначале уменьшается, что происходит за счет уменьшения его реактивной составляющей. При некотором токе возбуждения она становится равной нулю, а cos ?=1 . При дальнейшем увеличении тока возбуждения вновь появляется и увеличивается реактивная составляющая тока статора, но уже с опережающей фазой. Синхронный двигатель начинает работать генератором реактивной энергии с отдачей ее в сеть.
Характеристики рис. 2.22 позволяют выявить также зависимость компенсирующей способности СД от мощности Р на его валу. Как видно из рис. 2.22 с ростом мощности Р область генерации реактивной мощности (опережающего cos ? ) смещается в сторону больших токов возбуждения. Другими словами, при неизменном токе возбуждения с изменением мощности на валу отдаваемая в сеть реактивная мощность также меняется.
Из сказанного следует важный вывод: если СД работает с переменной нагрузкой на валу, то для полного использования его компенсирующих свойств требуется регулирование тока возбуждения.
Следует подчеркнуть, что при использования СД в качестве источника реактивной мощности необходимо обеспечивать повышенные токи возбуждения и увеличивать габаритную (полную) мощность СД, что не является ограничивающим фактором для такого применения СД. Покажем это следующим несложным расчетом.
Запишем отношение полной (габаритной) мощности S
к активной мощности Р
.
Пусть требуется, чтобы реактивная опережающая мощность составляла 40% активной мощности, т.е. Q/P=0,4 . Расчет выявляет, что при этом отношение S/Р составит 1,08 , т.е. генерирование указанной реактивной мощности потребует увеличения габаритной мощности только на 8%. Это показывает, что использование СД для компенсации реактивной мощности является выгодным.
При использовании СД для компенсации реактивной мощности обычно требуется рассматривать в комплексе несколько вопросов. Одним из основных является технико-экономическое обоснование использования данного способа компенсации реактивной энергии. Как известно, кроме СД для этой цели могут использоваться также статические компенсирующие устройства (конденсаторы) и синхронные компенсаторы. Среди приемлемых вариантов экономически целесообразным будет тот, который обеспечивает минимум приведенных годовых затрат:
З=К
н,э
К+С
э
=min,
Где К н,э – нормативный коэффициент эффективности капитальных вложений К ; С э - эксплуатационные расходы.
Если в результате выполненных технико-экономических расчетов выявлена целесообразность использования СД для компенсации определенной реактивной мощности Q , то далее необходимо установить наиболее экономическое ее распределение между отдельными СД. Это достигается отысканием оптимального варианта возбуждения СД, участвующих в компенсации. Под оптимальным вариантом возбуждения СД обычно принимают такое распределение реактивной мощности Q между отдельными СД, при котором суммарные потери активной мощности, зависящие от выработки и распределения реактивной мощности, минимальны.
На практике распределение реактивной мощности между СД часто производят пропорционально либо их полной номинальной мощности S ном , либо пропорционально их активной мощности Р ном . Этот принцип, как показывают расчеты, дает потери активной мощности, близкие к минимальному значению.
Токи возбуждения отдельных СД, компенсирующих заданную для них реактивную мощность, могут быть определены по кривым Q(I
В
)
, снятым опытным путем.
Содержательный модуль 3. Типовые узлы схем автоматического двигателя.
3.1. Принципы автоматического управления пуском и торможением двигателей.
Наибольшее распространение во всех отраслях промышленности получили электроприводы, относящиеся к первой группе классификации по функциональному назначению и обеспечивающие автоматическое управление процессами пуска, торможения и реверса двигателей. Их долевое участие в общем количестве использующихся в Украине электроприводов превышает 80%. В таких системах применяют контактные и бесконтактные электрические аппараты релейного действия. В силовых цепях, которые питают обмотки двигателей, используются электромагнитные контакторы переменного и постоянного тока, электромагнитные пускатели, тиристорные переключатели. В цепях управления различные реле времени, напряжения, тока, частоты, мощности и др. Команды на выполнение той или иной операции подаются с помощью кнопочных постов управления и т.п. Кроме этого сигналы на пуск, остановку, реверсирование или изменение скорости двигателя могут поступить в систему управления от путевых или конечных выключателей, датчиков давления, температуры и других датчиков, контролирующих работу технологических машин.
В рассматриваемой группе электроприводов автоматизация процесса пуска наиболее просто осуществляется для АД с короткозамкнутым ротором: после подачи команды на пуск операции управления сводятся к включению обмоток двигателя на полное напряжение сети, т.е. к прямому пуску двигателя. Асинхронные двигатели с короткозамкнутым ротором и синхронные двигатели большой мощности (больше 100кВт) запускаются при пониженном напряжении.
При пуске ДПТ и АД с фазным ротором автоматически выключаются ступени пускового реостата из цепи протекания тока якоря или ротора соответственно.
Автоматизация процесса торможения работающего двигателя при любом виде электрического торможения предусматривает выполнение двух основных операций управления: 1 – после подачи команды на торможение совершаются переключения в силовых цепях двигателя, приводящие к изменению направления вращающего момента двигателя, т.е. делающие его тормозным; 2 – в конце торможения при скорости близкой к нулю, двигатель, тормозящийся для остановки, отключается от сети и затормаживается механическим тормозом. В другом случае в главных цепях производятся переключения, необходимые для реверса двигателя, т.е. для разгона в противоположном направлении.
Системы автоматического управления пуском, торможением и реверсом, реализующие указанные ранее операции, конструктивно выполняют в виде комплектных стандартизованных устройств – станций управления. Кроме названного, станции управления обеспечивают возможность регулирования скорости двигателя, т.е. различные по величине скорости установившегося режима работы двигателя. На станциях управления устанавливаются аппараты электрической защиты главных цепей и цепей управления двигателем, командоаппараты, пускорегулировочные и тормозные резисторы, токоограничивающие реакторы и другие элементы располагают чаще всего вне станций управления.
У электрических аппаратов станций управления предусмотрены запасные контакты, которые могут быть использованы для сигнализации и различных блокировок. Возможно также подключение в цепи управления станций контактов конечных выключателей, технологических датчиков и аппаратов других автоматических устройств.
В электрических схемах станций управления широко применяются типовые узлы управления и защиты. Принципы построения типовых узлов рассмотрим на примере реостатного пуска ДПТ с независимым возбуждением с двумя ступенями пускового сопротивления. Схема включения двигателя приведена на рис. 3.1а, диаграмма скорости двигателя ? и тока якоря I Я – на рис.3.1б.
В первую очередь подключается к источнику напряжения U В обмотка возбуждения LM. Ток возбуждения I В , протекая по LM, создает магнитный поток Ф . после этого к источнику якорного напряжения U подключается якорная цепь двигателя.
При разомкнутых контактах контакторов ускорения КУ1 и КУ2 в момент времени t=0 замыкается контакт контактора линейного КЛ. Пусковый ток якоря I
Я1
протекает по обеим ступеням пускового сопротивления R
ДП1
и R
ДП2
. Если величина пускового сопротивления R
П
=R
ДП1
+R
ДП2
выбрана правильно, то пусковой ток  не будет превышать допустимого значения I
Я1
?I
Я доп
?2,5I
Я н
.
На якорь двигателя при скорости ?=0
начинает действовать пусковой момент М
П
.
Если М
П
больше момента сопротивления М
с
, момент динамический имеет положительную величину М
Д
>0
, то в соответствии с уравнением движения электропривода при пуске
не будет превышать допустимого значения I
Я1
?I
Я доп
?2,5I
Я н
.
На якорь двигателя при скорости ?=0
начинает действовать пусковой момент М
П
.
Если М
П
больше момента сопротивления М
с
, момент динамический имеет положительную величину М
Д
>0
, то в соответствии с уравнением движения электропривода при пуске  , величина углового ускорения
, величина углового ускорения  будет положительна и скорость вращения якоря двигателя ?
будет возрастать.
будет положительна и скорость вращения якоря двигателя ?
будет возрастать.
Рис. 3.1. а) схема включения двигателя;
Б) диаграмма скорости двигателя? и тока якоря I Я.
В обмотке якоря двигателя, вращающейся в магнитном потоке Ф
, будет находиться э.д.с. вращения Е=к?Ф
. Как следует из схемы включения двигателя на рис. 3.1а, э.д.с. вращения Е
по отношению к источнику якорного напряжения U
направлена встречно. Поэтому с увеличением ?
будет увеличиваться Е
и уменьшаться якорный ток  . С уменьшением I
Я
будет уменьшаться и вращающий момент двигателя М=кФI
Я
. Это, в свою очередь приведет к уменьшению динамического момента
. С уменьшением I
Я
будет уменьшаться и вращающий момент двигателя М=кФI
Я
. Это, в свою очередь приведет к уменьшению динамического момента
М
Д
=М-М
с
и скорости ?
. Как следует из диаграммы на рис. 3.1б по истечении промежутка времени ?t
1
двигатель достиг скорости ?
1
, а якорный ток величины I
Я2
. Вращающий момент двигателя М
стал равным М
с
, т.е. М
Д
=0
и поэтому увеличение скорости вращения якоря двигателя прекратилось. Двигатель из переходного режима работы с  при ?=?
1
перешел в установившийся режим с
при ?=?
1
перешел в установившийся режим с  .
.
Для того, чтобы продолжить разгон, необходимо замкнуть контакт первого контактора ускорения R ДП1 КУ1 и зашунтировать первую ступень пускового сопротивления R ДП1 . При этом якорный ток практически мгновенно увеличится до значения I Я1 , что приведет к появлению положительного М Д и росту скорости. По истечении промежутка времени ?t 2 двигатель достигнет скорости ? 2 , а якорный ток уменьшится до величины I Я2 . Двигатель перейдет в установившийся режим работы со скоростью ? 2 . Для продолжения разгона необходимо замкнуть контакт второго контактора ускорения КУ2 и зашунтировать R ДП2 . Вновь увеличится I Я , появится М Д >0 и продолжится рост скорости, который прекратится при М=М с .
Из графиков изменения во времени скорости и тока ДПТ при реостатном пуске с 2 ступенями пускового сопротивления видно, что автоматическое выключение (шунтирование) ступеней пускового сопротивления должно производиться:
1. через определенные промежутки времени (?t 1 , ?t 2 );
2. при определенных значениях скорости (? 1 , ? 2 );
3. при определенной величине тока I Я2 .
Таким образом, автоматическое управление пуском, суть которого заключается в шунтировании ступеней пускового реостата, может быть осуществлен:
1 – в функции времени;
2 – в функции скорости;
3 - в функции тока.
Управление в функции времени предполагает наличие в схеме автоматического управления реле времени, настраиваемых на отсчет заданных выдержек времени.
Управление в функции скорости производится при помощи реле, контролирующих скорость двигателя непосредственно или косвенно.
Управление в функции тока реализуется применением реле минимального тока. Все аппараты подают команды на включение контакторов ускорения.
Управление торможением может производиться в функции тех же самых величин и средств автоматизации, что и при пуске.
Все сказанное справедливо для ДПТ с последовательным возбуждением и АД с фазным ротором.
Лекция 13
3.2. Типовые узлы схем автоматического управления пуском ДПТ.
Каждый из принципов автоматического управления пуском и торможением реализуется в схемах электроприводов типовыми узлами.
Рис. 3.2. Типовой узел управления пуском ДПТ в функции времени.
Рис. 3.3. а) механические характеристики ДПТ с независимым возбуждением;
Б) механические характеристики ДПТ с последовательным возбуждением.
Типовой узел, обеспечивающий автоматический пуск в функции времени ДПТ с независимым и последовательным возбуждением с двумя ступенями пускового сопротивления R ДП1 и R ДП2 приведен на рис. 3.2. Механические характеристики двигателей, соответствующие схеме включения на рис. 3.2, приведены на рис. 3.3.
При подаче напряжения на главные цепи и цепи управления включается электромагнитное реле времени первой ступени РУ1 и, размыкая свой контакт, исключает возможность включения контакторов ускорения КУ1 и КУ2.
При нажатии на КнП включается КЛ, который своим главным контактом подключает к напряжению якорную цепь двигателя, замыкающими контактами шунтирует КнП (КЛ становится на самопитание) и подготавливает цепь включения КУ, а размыкающим контактом разрывает цепь питания катушки реле РУ1 и реле начинает отсчет выдержки времени. Двигатель начинает разгоняться по реостатной механической характеристике 1. При протекании пускового тока по R ДП1 срабатывает реле времени второй ступени РУ2, т.к. падение напряжения от пускового тока на R ДП1 велико. Контакт реле РУ2 размыкается в цепи питания катушки контактора КУ2. Реле времени РУ1 по истечении заданной выдержки времени отключается и замыкает свой контакт. Получает питание катушка КУ1. Контактор КУ1 включается и закорачивает R ДП1 . Двигатель переходит на механическую реостатную характеристику 2. Катушка реле РУ2 теряет питание. Реле РУ2 отсчитав заданную выдержку времени отключается и замыкает свой контакт. Включается КУ2, закорачивает R ДП2 и двигатель переходит на естественную характеристику. Достоинство управления в функции времени – простота и надежность реле времени, удобство регулировки их уставок, применение однотипных реле для двигателей различной мощности. Кроме того, при увеличении М с до величины М с " и той же выдержке времени реле РУ1 двигатель на первой характеристике разгонится до меньшей скорости, но бросок момента при переключении будет бо льшим. Поэтому средний динамический момент при пуске останется приблизительно тем же и почти не изменится и общее время пуска. При управлении в функции времени в отличие от управления в функции скорости или тока, отсутствует опасность «застревания» двигателя на первой характеристике при М с " >М с . Все это обусловило широкое распространение управления в функции времени.
Типовой узел, обеспечивающий автоматический пуск ДПТ с независимым возбуждением в функции скорости в две ступени, механические характеристики двигателя и диапазона напряжения на зажимах якоря двигателя приведены на рис. 3.4.
Катушки РУ1 и РУ2 подключены на зажимы якоря двигателя, т.е. на напряжение U Я , которое отличается от Е только на величину падения напряжения от тока якоря на сопротивлении якоря R Я . Следовательно РУ1 и РУ2 являются аппаратами, контролирующими э.д.с. вращения двигателя. Поскольку э.д.с. при постоянном магнитном потоке пропорциональна скорости вращения двигателя ? Е=кФ н ? , то рассматриваемый узел осуществляет управление пуском в функции скорости при ее косвенном контроле.
При нажатии КнП включается КЛ. Напряжение на катушках РУ1 и РУ2 мало и равно падению напряжения в якоре от начального броска пускового тока I П R Я . Поэтому РУ1 и РУ2 сработать не могут, контакторы КУ1 и КУ2 отключены и в цепь якоря введено R ДП1 +R ДП2 . Двигатель запускается по характеристике 1. По мере увеличения скорости двигателя возрастает Е и U Я .
Рис. 3.4. а) схема включения двигателя;
Б) механические характеристики двигателя;
В) диаграмма напряжения на зажимах якоря.
При U Я1 =U ср. РУ1 включается РУ1 и включает КУ1, который закорачивает первую ступень сопротивления R ДП . Двигатель переходит на характеристику 2. Скорость двигателя продолжает расти, поэтому возрастает и его э.д.с. При U Я2 =U ср. РУ2 включается РУ2, контактор КУ2, закорачивающий вторую ступень сопротивления R ДП2 и двигатель выходит на естественную характеристику.
Типовой узел, обеспечивающий автоматический пуск ДПТ с независимым возбуждением в функции тока якоря I Я и потока Ф приведена на рис. 3.5.
Рис. 3.5. а) схема включения двигателя;
Б) диаграмма Ф, I Я, ?.
Типовой узел применяется при разгоне ДПТ независимого возбуждения путем ослабления магнитного потока для расширения диапазона регулирования ? . На рисунке не показаны цепи управления контакторами КЛ, КУ1, КУ2. пуск до основной скорости может осуществляться одним из рассмотренных способов. Контроль I Я осуществляется токовым реле РУП.
Работа типового узла начитается после включения контактора КУ2 при выходе М на естественную характеристику. При замыкании главного контакта КУ2 от броска якоря срабатывает реле РУП и замыкает свой контакт, шунтирующий реостат возбуждения R
ДВ
. До этого он был закорочен размыкающим контактом КУ2. Следовательно магнитный поток двигателя Ф сохраняется равным Ф
Н
и двигатель продолжает разгон по естественной характеристике. Когда I
я
снизится до I
возв РУП
, реле РУП отключается, размыкает свой контакт и в цепь LM вводится R
ДВ
. Происходит ослабление Ф
и рост ?
. При этом ток якоря увеличивается и, когда он достигнет значения I
сраб РУП
, контакт реле замыкается. Начинается усиление Ф
и снижение I
я
. Скорость М
будет продолжать расти, т.к. за счет увеличения I
я
М>М
с
. При спадании I
я
до величины I
возв РУП
реле РУП вновь откроет свой контакт, что повлечет за собой ослабление Ф
и т.д. Реле РУП срабатывает несколько раз, прежде чем двигатель достигнет скорости, заданной положением ползунка реостата R
ДВ
. I
я
колеблется в пределах от I
возв РУП
до I
сраб РУП
, поэтому способ управления получил название вибрационного. Он обеспечивается и в том случае, когда ползунок реостата R
ДВ
быстро перемещается в сторону ослабления Ф
.
Лекция 14.
3.3. Типовые узлы схем автоматического управления торможением ДПТ.
Управление торможением двигателей производится в функции времени, скорости или тока с применением тех же средств, что и при пуске. Автоматизация процесса торможения при любом его виде предусматривает выполнение двух основных операций:
1 – после подачи команды на торможение в силовых цепях работающего двигателя производятся переключения, в результате которых изменяется направление момента двигателя;
2 – в конце торможения при? близкой к нулю, М автоматически отключается от сети, либо в силовых цепях производятся переключения, необходимые для реверса.
Рис. 3.6. Управление в функции времени динамическим торможением ДПТ:
А) схема включения двигателя;
Б) механические характеристики.
Типовой узел, обеспечивающий автоматическое управление динамическим торможением ДПТ с независимым возбуждением в функции времени приведен на рис. 3.6а. Соответствующие схеме включения двигателя механические характеристики изображены на рис. 3.6б. Пуск двигателя показан условно в одну ступень. Управление КУ при пуске может осуществляться одним из ранее рассмотренных методов. По окончании пуска двигатель работает в точке А на естественной характеристике. Направление э.д.с. вращения Е
и тока якоря I
Я
показано для двигательного режима работы.
При пуске замыкающий контакт КЛ подает питание на катушку реле динамического торможения РДТ и реле срабатывает. Замыкающий контакт РДТ в цепи питания катушки контактора динамического торможения КДТ замкнется. Однако КДТ не включится, т.к. в цепи питания его катушки разомкнут контакт КЛ.
При нажатии на кнопку «стоп» КнС отключится контактор КЛ и якорная цепь двигателя будет отключена от источника якорного напряжения U . Потеряет питание катушка РДТ. Однако реле РДТ, электромагнитное реле времени, останется во включенном состоянии и будет вести отсчеты выдержки времени. Включится контактор КДТ и к зажимам якоря двигателя будет подключено сопротивление динамического торможения R ДТ . В образовавшемся контуре под действием Е будет протекать ток динамического торможения I Я ДТ , направленный встречно к току двигательного режима I Я . Поэтому изменит направление и станет тормозным вращающий момент двигателя. Двигатель из точки А перейдет в точку В на характеристике динамического торможения и его скорость будет снижаться. По окончании отсчета выдержки времени реле РДТ отключится, разомкнет свой контакт в цепи питания катушка КДТ и отключит его.
Управление торможением в функции времени применяется только при реактивном М с . Уставка РДТ должна быть равной или немного большей времени торможения. При активном М с его увеличение уменьшает действительное время торможения по сравнению с уставкой реле РДТ, что под действием активного М с вал М всегда должен быть заторможен при помощи механического тормоза.
Автоматическое управление динамическим торможением ДПТ с независимым возбуждением при активном М
с
осуществляется в функции скорости при ее прямом или косвенном контроле. Схема типового узла приведена на рис. 3.7.
Рис. 3.7. Схема включения ДПТ с независимым возбуждением в режиме динамического торможения.
Контроль э.д.с. осуществляется посредством реле напряжения РДТ. Катушка РДТ включена на зажимы якоря двигателя. Пусковые сопротивления и КУ на схеме не показаны. РДТ срабатывает во время пуска при U
Я
=0,6ч0,7U
Н
. При отключении КЛ включается КДТ. На зажимы якоря подключается R
ДТ
и двигатель тормозится. Когда скорость станет достаточно малой РДТ отпустит якорь и отключит КДТ. Вал двигателя свободен, когда электромагнит тормоза ЭмТ получает питание. Поэтому катушка тормозного контактора КТ получает питание как в двигательном режиме, так и в тормозном. R
Р
предотвращает отпадание якоря в процессе переключения КЛ и КДТ.
При реверсивной схеме включения ДПТ с независимым или последовательным возбуждением автоматическое управление процессом торможения протвивоключением осуществляется в функции скорости при косвенном контроле ее величины по э.д.с. вращения двигателя. Схема включения двигателя приведена на рис. 3.8а. На ней показаны обмотки независимого LМ1 и последовательного LМ2 возбуждения. Механические характеристики, соответствующие схеме включения двигателя, приведены на рис. 3.8б, а схема цепей управления на рис. 3.8в. В ней используется не кнопочное, а более удобное командоконтроллерное управление. Вертикальные штриховые линии означают фиксированные положения рукоятки командоконтроллера. В данном случае их три: 0 – нулевое (среднее) положение; В – вперед; Н – назад. Точка на штриховой линии под контактом означает, что контакт в данном положении замкнут. В нашем случае команды командоконтроллера КК1 и КК2 в нулевом положении рукоятки разомкнуты; в положении «вперед» замкнут КК1, а КК2 разомкнут; в положении «назад» - наоборот.
Пуск двигателя показан условно в одну ступень в функции времени. Для пуска двигателя в направлении «вперед» необходимо перевести рукоятку командоконтроллера из положения «0» в положение «В». Замкнется контакт КК1 командоконтроллера и получит питание катушка контактора «вперед» КВ: контактор КВ срабатывает и своими главными контактами подключает якорь двигателя к источнику напряжения U
. Катушки контакторов противовключения КП и ускорения КУ питания не получают, контакторы отключены и их главные контакты разомкнуты. Пусковой ток протекает по R
ДП
и R
ДПР
. Поэтому двигатель начинает разгон по характеристике противовключения в I квадранте. Появляется падение напряжения от пускового тока на R
ДПР
и получает питание катушка реле РУ. Включится реле ускорения РУ и разомкнет свой контакт в цепи питания катушки КУ. Рис. 3.8. а) реверсивная схема включения ДПТ;
Рис. 3.8. а) реверсивная схема включения ДПТ;
Б) механические характеристики ДПТ с независимым возбуждением;
в) схема цепей управления.
Замыкающий контакт КВ подает питание на катушку реле противовключения «вперед» РПВ. Реле РПВ срабатывает и своим замыкающим контактом подает питание на катушку КП. Контактор КП срабатывает и своим главным контактом шунтирует R ДПР . Двигатель с характеристики противключения переходит на пусковую характеристику. Одновременно с этим теряет питание катушка РУ и реле начинает отсчет выдержки времени. По окончании выдержки времени реле РУ отключится, его контакт в цепи питания катушки КУ замкнется и контактор ускорения КУ сработает. Главный контакт КУ замкнется и зашунтирует R ДП . Двигатель перейдет на естественную характеристику, где будет работать в точке А.
Дял перевода двигателя в режим торможения противовключением необходимо рукоятку командоконтроллера из положения «В» перевести в положение «Н». При переходе рукоятки через положение «0» оба контакта командоконтроллера оказываются разомкнутыми, поэтому катушки КВ, КП, КУ теряют питание и контакторы отключаются. В цепь протекания якорного тока включаются R ДП и R ДПР , т.е. двигатель подготавливается к режиму торможения противовключением. В положении рукояти «Н» замыкается контакт КК2. Получает питание катушка контактора «назад» КН и контактор КН срабатывает. Главные контакты КН замыкаются и изменяют полярность напряжения на зажимах якоря двигателя. Изменяется направление якорного тока и вращающего момента двигателя. Он становится тормозным. Двигатель из точки А переходит в точку В на характеристике противовключения. Замыкающий контакт КН в цепи питания катушки реле противовключения «назад» РПН замкнется, однако реле РПН не включится. Это обеспечивается подключением правого по схеме вывода катушки РПН, т.е. величиной R хх . Катушки КП и КУ питание не получают, контакторы отключены и двигатель тормозится по характеристике противовключения. Реле РУ включено и его контакт в цепи питания катушки КУ разомкнут.
С уменьшением скорости двигателя напряжение на катушке РПН увеличивается. При скорости, близкой к нулю, РПН включится и своим замыкающим контактом подает питание на катушку КП. Контактор КП сработает и своим главным контактом зашунтирует R ДПР . Двигатель перейдет на пусковую характеристику. Потеряет питание катушка РУ и реле начнет отсчет выдержки времени. Двигатель по пусковой характеристике затормозится и сразу же начнет разгон в направлении «назад». По окончании выдержки времени РУ отключится и включит КУ. Главный контакт КУ зашунтирует R ДП , двигатель перейдет на естественную характеристику, где будет работать в точке Е.
Для ДПТ с последовательным возбуждением процессы аналогичны. Соответствующие характеристики приведены на рис. 2.13а.
Напряжение на катушке РПВ(Н) определится из соотношения U
РПВ
=U–І
Я
Rх
; Ток при торможении противовключением определяется как 
Решая совместно два последних выражения, найдём зависимость напряжения на катушке реле РПВ от скорости
Величина U, R
ДП
, R
ДПР
, Ф и R
х
=
const
, поэтому U
РПВ
будет линейно зависеть от скорости ?
.
 откуда
откуда 
ток в начале торможения будет равен 
 .
.
Т.к. U?Е
тах
получим R
x
=0,5(R
ДП
+
R
ДПР)
Напряжение на катушке РПВ при уменьшении скорости возрастает. При ?=0
и R
x
=0,5
R
имеем
Таким образом, если точку присоединения РП выбрать в соответствии с R
x
=0,5
R
а напряжение срабатывания U
ср.РП
=0,5U
, то будет обеспечен рассмотренный выше порядок работы схемы.
Рассматриваемая схема полностью симметрична, поэтому полученные результаты справедливы как для реле РПВ так и для реле РПН.
Лекция 15
3.4. Типовые узлы схем автоматического управления пуском двигателей переменного тока.
Графики изменения во времени скорости и тока двигателя на рис. 3.1, построенные для ДПТ справедливы и для АД с фазным ротором, т.к. рабочая часть механической характеристики АД линейна как и механическая характеристика ДПТ с независимым возбуждением; с ростом сопротивления в цепи ротора наклон рабочей части характеристик к оси абсцисс увеличивается. Поэтому автоматическое управление пуском и торможением двигателей переменного тока осуществляется в функции тех же величин и с использованием аналогичных электрических аппаратов.
Типовой узел, обеспечивающий автоматический пуск АД с фазным ротором в две ступени в функции времени, приведен на рис. 3.9.
Цепи управления питаются от сети постоянного тока. При большой частоте включения двигателя используют контакторы переменного тока с катушками постоянного тока и электромагнитные реле времени, электрические аппараты
Постоянного тока. Схема отличается от схемы управления пуском ДПТ лишь тем, что катушка реле времени РУ2 включена в цепь управления через
Рис. 3.9. Схема включения АД с фазным ротором.
размыкающий контакт КУ1. Таким образом РУ2 включается при подаче напряжения на схему, а отсчёт выдержки времени начинается РУ2 с момента размыкания контакта контактора КУ1.
Для СД всегда применяют асинхронный пуск. Поэтому в статорных цепях СД осуществляются так же переключения, как и при пуске АД: – статорные обмотки включаются на полное напряжение (прямой пуск) либо на пониженное напряжение с последующим переключением в функции времени на полное.
Специфическая особенность пуска СД – управления подачей в обмотку возбуждения постоянного тока от возбудителя. В качестве последних используют генераторы постоянного тока или тиристорные преобразователи. Для быстроходных СД вал возбудителя соединяют с валом двигателя, для тихоходных СД привод возбудителя выполняют на основании АД с короткозамкнутым ротором.
Если позволяют питающая сеть и двигатель, то применяют прямой пуск с постоянно подключённым возбудителем при М с на валу СД не превышающем 0,4М н . Если М с >0,4М н , то возбудитель подключается на подсинхронной скорости.
При пуске на пониженном напряжении различают: «лёгкий» пуск, при котором возбуждение подаётся до включения обмотки статора на полное напряжение (при небольшом М с ) и «тяжёлый» пуск – подача возбуждения происходит при полном напряжении на обмотке статора (при значительном М с ).
На рисунке 3.10.а – схема прямого пуска с наглухо подключённым возбудителем В. Управление пуском состоит во включении линейного выключателя ВЛ или контактора КЛ. По мере разгона М напряжение В растёт, растёт и ток возбуждения. При подсинхронной скорости он оказывается достаточным для вхождения М в синхронизм.
Схемы на рисунке 3.10.б и 3.10.в применяют при более тяжёлых условиях пуска. Начинается пуск с включения ВЛ (КЛ). Обмотка возбуждения ОВМ либо замкнута на разрядное сопротивление R Р , либо подключена к возбудителю последовательно с R Р . Подачей возбуждения можно управлять в функции скорости (скольжения) или тока статора М . Первый способ рис. 3.10.б. реализуют при помощи электромагнитного реле времени постоянного Его катушка включена через диод Д на часть R р . При подключении обмотки статора М к сети в обмотке возбуждения наводится переменная э.д.с. По катушке РПВ начнёт протекать выпрямленный диодом ток і кат в виде импульсов, амплитуда и частота которых пропорциональны скольжению ѕ . В самом начале пуска, когда ѕ=1 , амплитуды импульсов тока і кат достаточно велики а временные интервалы между ними малы, поэтому РПВ включится. По мере разгона М амплитуда импульсов уменьшается, а временные интервалы между ними увеличиваются. При подсинхронной скорости эти интервалы станут равными времени выдержки и РПВ отключится. Его контакт замкнётся и включит КВ. Из-за разброса выдержек РПВ схема не обеспечивает чёткого вхождения М в синхронизм.
В основном применяют управление в функции тока статора М
(рис. 3.10.в.). Токовое реле РПВ получает питание от трансформатора тока ТрТ, включённого в фазу статорной цепи. Известно, что при асинхронном пуске ток статора в зоне подсинхронной скорости резко уменьшится. Это обстоятельство и используют для фиксации момента подачи возбуждения. При нажатии на КнП срабатывает КЛ. От броска пускового тока срабатывает и РПВ. Его размыкающий контакт в цепи катушки КВ размыкается, и замыкающий контакт включает блокировочное реле РБ. РБ становится на самопитание и подготавливает цепь включения КВ. На подсинхронной скорости ток статора снижается, РПВ отключается. Включается КВ. Его контакты закорачивают R
р
и катушку РПВ, чтобы РПВ не сработало от броска тока статора при вхождении М
в синхронизм.
Рис. 3.10. а) схема прямого пуска;
Б) схема пуска в функции скорости;
В) схема пуска в функции тока;
Г) схема цепей управления.