Из-за малого потребления активной мощности коэффициент мощности двигателя крайне низкий при холостом ходе или при малой нагрузке. Реактивный ток двигателя остается практически постоянным при всех нагрузках, так что на ряд ненагруженных двигателей приходится потребление реактивной мощности, которое лишь негативно сказывается на установке по причинам, описанным в предыдущих разделах.
Которые могут быть записаны в двухфазных стационарных переменных кадра. В этом разделе анализируется взаимосвязь между мощностью статора и током ротора. Соотношения между токами ротора и статора. Как ни странно, это единственный модуль, который зависит от значений параметров. Благодаря прямому соединению с крутящим моментом, ссылка на активную мощность - это самый простой способ узнать требуемое значение крутящего момента.
С другой стороны, есть некоторые трудности, связанные с ссылкой на активную мощность. Обычно для вычисления значения активной мощности достаточно следующего уравнения. Как видно из литературы, в то время как некоторые исследователи могут предположить, что мощность сопротивления статора и потери на железо могут быть проигнорированы, мощность в сопротивлении ротора нельзя игнорировать, особенно в условиях тяжелой нагрузки, когда скольжение машины может быть большим.
Поэтому два хороших правила состоят в том, что ненагруженные двигатели следует отключать, а номинальные мощности двигателей не должны завышаться (поскольку это снизит их загрузку).
Соединение
КБ должна подключаться непосредственно к зажимам двигателя.
Специальные двигатели
Влияние на уставки защиты
После применения компенсации для двигателя ток блока «двигатель-конденсатор» станет меньше, чем до компенсации при том же режиме нагрузки двигателя. Это вызвано тем, что значительная часть реактивной составляющей тока двигателя подается от конденсатора, как показано на рис. L23 .
Как видно из диаграммы, в условиях движения входная мощность разделяется на две части: одна часть предназначена для потерь, а другая часть связана с мощностью вращающегося поля. Кроме того, при генерации мощности входного вала разделяется на две части: потери и механическую мощность. Все эти части должны быть сбалансированы для достижения целевого значения мощности.
Генерации реактивной мощности опорной связаны с скольжением. Итак, сначала мы должны с этим справиться. дает приближенную векторную диаграмму напряжений, токов и потоков индукционной машины. Реактивную мощность можно рассчитать как умножение ЭДС напряжения на одной оси машины на ток на другой оси.
Если максимальная токовая защита двигателя расположена до соединения двигателя и конденсатора (это всегда так в случае подсоединения конденсаторов к зажимам), уставки реле защиты должны уменьшаться на отношение:
cos φ до компенсации/cos φ после компенсации
Для двигателей с компенсацией в соответствии со значениями квар, показанными на рис. L24 (максимальные значения, рекомендуемые для предотвращения самовозбуждения стандартных асинхронных двигателей, как обсуждается в подразделе Методы предотвращения самовозбуждения асинхронного двигателя), величины указанного выше отношения приведены для различных скоростей на рис. L25 .
Потребители реактивной мощности
Реорганизацию можно написать. Ω = угловая скорость скольжения, связанная со скоростью скольжения. Экспериментально исследована экспериментальная установка с использованием системы управления, показанная в работе Ямамото и Мотойоши, и характеристики системы управления вдоль рамы М-Т. Экспериментальные данные взяты из их исследования. На рисунке показана схема экспериментальной системы.
Затем ряд может быть выражен как. Альтернативно, серия может быть выражена как. Условия анализа заключаются в следующем. Используя эти условия, трехфазный ток ротора можно определить следующим образом. Характеристики передачи от обмотки ротора к обмотке статора анализируются путем подстановки в основное уравнение машины индукции роторного ротора. В анализе используется метод симметричной координаты для упрощения. В этом случае значение компонента положительной фазовой последовательности и значение компонента отрицательной фазовой последовательности имеют сопряженное соотношение.
Рис. L23: До компенсации трансформатор пропускает всю реактивную мощность, после компенсации конденсатор подает большую часть реактивной мощности
| Трехфазные двигатели, 230/400 В | |||||
|---|---|---|---|---|---|
| Номинальная мощность | Устанавливаемая мощность (квар) | ||||
| Скорость вращения (об/мин) | |||||
| кВт | л.с. | 3000 | 1500 | 1000 | 750 |
| 22 | 30 | 6 | 8 | 9 | 10 |
| 30 | 40 | 7,5 | 10 | 11 | 12,5 |
| 37 | 50 | 9 | 11 | 12,5 | 16 |
| 45 | 60 | 11 | 13 | 14 | 17 |
| 55 | 75 | 13 | 17 | 18 | 21 |
| 75 | 100 | 17 | 22 | 25 | 28 |
| 90 | 125 | 20 | 25 | 27 | 30 |
| 110 | 150 | 24 | 29 | 33 | 37 |
| 132 | 180 | 31 | 36 | 38 | 43 |
| 160 | 218 | 35 | 41 | 44 | 52 |
| 200 | 274 | 43 | 47 | 53 | 61 |
| 250 | 340 | 52 | 57 | 63 | 71 |
| 280 | 380 | 57 | 63 | 70 | 79 |
| 355 | 482 | 67 | 76 | 86 | 98 |
| 400 | 544 | 78 | 82 | 97 | 106 |
| 450 | 610 | 87 | 93 | 107 | 117 |
Рис. L24: Максимальное значение квар индивидуальной компенсации реактивной мощности без риска самовозбуждения двигателя
Применяя преобразование Лапласа, рассчитывается ток статора. Ток статора фазы А получается следующим образом. Результаты этого анализа показывают, что гармонические токи, подаваемые на обмотку роторов, передаются на обмотки статора путем изменения его частоты. Это эффект скорости вращения генератора индукции раневого ротора. Более того, соотношение между амплитудой гармонических токов в роторе и статоре составляет почти 1. Приводится пример экспериментальных результатов. Видно, что экспериментальные значения хорошо совпадают с теоретическими.
Двигатель с высокоинерционной нагрузкой будет продолжать вращаться (если специально не затормаживается) после отключения его питания.
«Магнитная инерция» цепи ротора означает создание ЭДС в обмотке статора на короткий период времени после отключения, которая уменьшиться до нуля через 1 или 2 периода в случае двигателя без компенсации.
Таким образом, эксперименты подтвердили, что анализ дает надежные результаты. Технологический университет Тшвана, Претория, Южная Африка. Асинхронные двигатели на сегодняшний день являются наиболее используемым электромеханическим устройством в промышленности. Асинхронные двигатели обладают многими преимуществами по сравнению с другими типами двигателей. Они дешевые, прочные, легко ремонтируемые и могут использоваться во взрывоопасных зонах. Несмотря на свои преимущества, у него есть один главный недостаток.
При запуске мощность, потребляемая двигателем, в основном реактивна и может достигать 8-кратного номинального тока при коэффициенте мощности около 2, пока он не достигнет номинальной скорости, после чего коэффициент мощности увеличится до более чем 6, если двигатель правильно и в зависимости от размера двигателя.
Однако, подключенные конденсаторы создают трехфазную реактивную нагрузку для такой затухающей ЭДС, которая вызывает емкостные токи в обмотке статора. Такие токи в статоре создают вращающееся магнитное поле, которое действует точно по той же оси и в том же направлении, что и затухающее электромагнитное поле.
Как следствие, поток ротора увеличивается, токи статора увеличиваются, и напряжение на зажимах двигателя повышается иногда до опасно высокого уровня. Это явление известно как самовозбуждение и является одной из причин того, почему генераторы переменного тока, как правило, не работают при опережающих коэффициентах мощности, т.е. имеется тенденция к спонтанному (и неконтролируемому) самовозбуждению.
Для повышения коэффициента мощности требуется компенсация реактивной мощности, когда реактивная мощность вводится. Было предложено несколько методов, включая синхронную компенсацию, которая является сложной и дорогостоящей. В этой главе исследуется другой подход для коррекции коэффициента мощности, когда статор асинхронного двигателя имеет два набора трехфазных обмоток, которые электрически изолированы, но с магнитной связью. Основная обмотка подключена к трехфазному питанию, а вспомогательная обмотка подключена к фиксированным конденсаторам для впрыска реактивной мощности.
Примечания:
1. Характеристики двигателя, приводимого в движение инерцией нагрузки, не являются строго идентичными его характеристикам холостого хода. Однако, данное предположение является достаточно точным с практической точки зрения.
2. В двигателе, действующем в качестве генератора, циркулирующие токи являются в основном реактивными, так что эффект торможения (замедления) двигателя вызван главным образом только нагрузкой, представленной его охлаждающим вентилятором.
Произвольная система координат
Произвольная система координат в основном используется в динамическом анализе электрических машин. Из-за сильно связанной природы машины, особенно индуктивности в обмотке, сделать невозможным динамическое моделирование и анализ электрических машин довольно сложно.
Используя этот метод, полифазная машина преобразуется в двухфазную машину с магнитной осью в квадратуре, как показано на рисунке. Это преобразование устраняет взаимную магнитную связь между фазами и, следовательно, делает связь магнитного потока одной обмотки независимой от тока другой обмотки.
3. Ток (угол отставания почти 90°), потребляемый от источника питания ненагруженным двигателем в нормальных условиях, и ток (угол опережения почти 90°), подаваемый на конденсаторы двигателем, выступающим в качестве генератора, имеют одинаковое фазовое соотношение с напряжением на зажимах. Именно поэтому две характеристики могут налагаться на один график.
Моделирование трехфазного асинхронного двигателя
Показана схема намотки симметричной индукционной машины. Трехфазная схема намотки. При разработке уравнений, описывающих поведение индукционной машины, сделаны следующие предположения.
- Вихревыми токами, потерями трения и потерь и насыщенностью пренебрегают.
- Обмотки распределены синусоидально вокруг воздушного зазора.
После получения уравнений напряжения в естественной системе отсчета может быть выполнено преобразование в произвольную систему отсчета. Очень удобно сначала перенести все переменные ротора на статор, применив соответствующий коэффициент поворотов. - представляет все переменные ротора и выражается в упрощенном виде, включая переменные всех фаз ротора в одном уравнении.
Для предотвращения самовозбуждения, как описывается выше, номинальная мощность (квар) блока конденсаторов должна ограничиваться следующим максимальным значением:
Где Io - ток холостого хода двигателя и Un - межфазное номинальное напряжение двигателя (кВ). На рис. L24 приводятся значения Qc, соответствующие данному критерию.
Пример:
Преобразование уравнений напряжения в произвольную систему отсчета рассматривается в разделе. Важно определить различные индуктивности, которые будут влиять на флюсовую связь, а также преобразовать ее в произвольную систему отсчета. Флюксовые связи, как видно из уравнений напряжения, являются функциями индуктивности и, следовательно, должны быть определены индуктивности в двигателе.
Индукции в двигателе состоят из собственной индуктивности, индуктивности рассеяния, индуктивности намагничивания и взаимной индуктивности. Самоиндукция в обмотках статора состоит из индуктивности намагничивания и утечки. Обмотки идентичны, и поэтому сама индуктивность всех обмоток статора будет одинаковой.
Трехфазный двигатель, 75 кВт, 3000 об./мин, 400 В, может иметь блок конденсаторов не выше 17 квар согласно рис. L24. Табличные значения, как правило, слишком малы для соответствующей компенсации двигателя до нормально требуемого уровня cos φ. Однако, дополнительная компенсация может осуществляться, например, с помощью КБ централизованной компенсации, установленной на шинах ТП.
Сама индуктивность в обмотках ротора аналогична обмотке статора. Между всеми обмотками как статора, так и ротора существует взаимная индуктивность. Существует четыре разных типа взаимной индуктивности: статор-статор, ротор-ротор, ротор-статор и ротор-статор.
Взаимная индуктивность ротора-ротора аналогична взаимной индуктивности статора-статора и может быть выражена как. Взаимодействующие индукторы статора-ротора зависят от положения ротора в соответствии со следующим соотношением. Матрица индуктивности делится на четыре подматрицы.
Высокоинерционные двигатели и/или нагрузки
В любой установке с высокоинерционными нагрузками, приводимыми в действие двигателями, выключатели или контакторы, управляющие такими двигателями, должны быстро отключаться в случае полной потери электропитания.
Если не принять такой меры предосторожности, велика вероятность возникновения крайне высоких напряжений (из-за самовозбуждения), поскольку все другие КБ работают в сети параллельно с конденсаторами высокоинерционных двигателей.
Где ξ - фиктивная переменная для интегрирования. Теперь добавление уравнений напряжения для резистивной и индуктивной частей дает полное уравнение напряжения статора в произвольной системе отсчета. Используя тот же метод, можно определить уравнение напряжения ротора.
Там, где ω представляет скорость вращения опорного кадра и ω г скорость вращения ротора. Модель, разработанная до сих пор является общей моделью в произвольной системе отсчета, что означает, что эта модель может принимать форму любого опорного кадра в зависимости значение замещенного для со, поэтому называется произвольным.
Поэтому схема защиты таких двигателей должна содержать реле отключения по максимальному напряжению вместе с реле контроля обратной мощности (двигатель подает питание на остальное оборудование до рассеяния полученной инерциальной энергии).
Если мощность конденсаторов индивидуальной компенсации высокоинерционного двигателя, больше, чем рекомендованная на рис. L24, они должны управляться отдельно с помощью выключателя или контактора, который осуществляет отключение вместе с главным выключателем или контактором двигателя, как показано на рис. L26.
Различные опорные кадры получают путем подстановки соответствующего значения скорости в системе отсчета со. Обычно используются три различные опорные кадры, стационарная система отсчета, где ω = 0, синхронный опорный кадр, где ω устанавливается на угловую скорость напряжения питания и опорную рамку ротора, где ω задано угловой скоростью ротора. Использование опорных кадров зависит от характера решаемой задачи.
Пуск и регулирование скорости вращения
Уравнение крутящего момента для трехфазной индукционной машины хорошо известно и не выводится в этом разделе. Уравнение крутящего момента трехфазной машины со вспомогательной обмоткой выводится в разделе. Электродвигатель является электромеханическим устройством и нуждается в уравнении, которое соединяет электрические и механические системы.
Включение главного контактора осуществляется после включения конденсаторов.
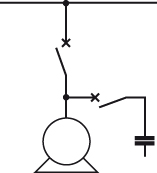
Рис. L26: Подсоединение блока конденсаторов к двигателю
Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n 2 , η, полезного момента (момента на валу) М 2 , коэффициента мощности cos φ, и тока статора I 1 от полезной мощности Р 2 при U 1 = const f 1 = const.
Моделирование трехфазных с вспомогательной обмоткой
Эта машина состоит из двух трехфазных обмоток, расположенных друг над другом в одних и тех же слотах. Это означает, что между двумя обмотками нет смещения. Эти две обмотки электрически изолированы, но магнитно связаны. Одна из этих обмоток рассматривается как основная обмотка и будет снабжена трехфазным напряжением. Оставшаяся обмотка рассматривается как вспомогательная обмотка. Вспомогательная обмотка подключается к статическим конденсаторам для впрыска реактивной мощности. Впрыск реактивной мощности улучшит коэффициент мощности машины.
Расчет рабочих характеристик асинхронного двигателя
Скоростная характеристика n 2 = f(P 2). Частота вращения ротора асинхронного двигателя n 2 = n 1 (1 — s).
Скольжение s = P э2 /P эм, то есть , а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Р э2 = 0, а поэтому s ≈ 0 и n 2 ≈ n1.
Схема обмотки показана на рисунке. Обмотка основной и вспомогательной обмоток. Предположения при разработке уравнений, описывающих поведение этой машины, совпадают с предположениями, упомянутыми в разделе 3, с одним добавлением. Предполагается, что основная и вспомогательная обмотка идентичны. Он имеет такое же сечение проводника и такое же количество оборотов.
Уравнения напряжения для этой машины разработаны так же, как описано в разделе. Существуют три дополнительных уравнения напряжения из-за дополнительного набора трехфазных обмоток. Для простоты уравнения напряжения представлены в матричном формате. Предполагается, что основная и вспомогательная обмотки идентичны и, следовательно, будут иметь такое же сопротивление.
По мере увеличения нагрузки на валу асинхронного двигателя отношение s = P э2 /P эм растет, достигая значений 0,01 — 0,08 при номинальной нагрузке. В соответствии с этим зависимость n 2 = f(P 2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r 2′ угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n 2 при колебаниях нагрузки Р 2 возрастают. Объясняется это тем, что с увеличением r 2′ возрастают электрические потери в роторе.
Рабочие характеристики асинхронного двигателя
Зависимость М 2 = f(P 2). Зависимость полезного момента на валу асинхронного двигателя М 2 от полезной мощности Р 2 определяется выражением M 2 = Р 2 /ω 2 = 60 P 2 /(2πn 2) = 9,55Р 2 /n 2 , где Р 2 - полезная мощность, Вт; ω 2 = 2πf 2 /60 - угловая частота вращения ротора.
Из этого выражения следует, что если n 2 = const, то график М 2 = f 2 (Р 2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р 2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М 2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М 2 = f (P 2) имеет криволинейный вид.
Зависимость cos φ 1 = f (P 2). В связи с тем что ток статора I 1 имеет реактивную (индуктивную) составляющую, необходимую для создания магнитного поля в статоре, коэффициент мощности асинхронных двигателей меньше единицы. Наименьшее значение коэффициента мощности соответствует режиму холостого хода. Объясняется это тем, что ток холостого хода электродвигателя I 0 при любой нагрузке остается практически неизменным. Поэтому при малых нагрузках двигателя ток статора невелик и в значительной части является реактивным (I 1 ≈ I 0). В результате сдвиг по фазе тока статора относительно напряжения получается значительным (φ 1 ≈ φ 0), лишь немногим меньше 90°.
Коэффициент мощности асинхронных двигателей в режиме холостого хода обычно не превышает 0,2. При увеличении нагрузки на валу двигателя растет активная составляющая тока I 1 и коэффициент мощности возрастает, достигая наибольшего значения (0,80 — 0,90) при нагрузке, близкой к номинальной. Дальнейшее увеличение нагрузки на валу двигателя сопровождается уменьшением cos φ 1 что объясняется возрастанием ротора (x2s) за счет увеличения скольжения, а следовательно, и частоты тока в роторе.
В целях повышения коэффициента мощности асинхронных двигателей чрезвычайно важно, чтобы двигатель работал всегда или по крайней мере значительную часть времени с нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном . Если же двигатель работает значительную часть времени недогруженным, то для повышения cos φ 1 , целесообразно подводимое к двигателю напряжение U 1 уменьшить. Например, в двигателях, работающих при соединении обмотки статора , это можно сделать пересоединив обмотки статора в , что вызовет уменьшение фазного напряжения в раз. При этом магнитный поток статора, а следовательно, и намагничивающий ток уменьшаются примерно в раз. Кроме того, активная составляющая тока статора несколько увеличивается. Все это способствует повышению коэффициента мощности двигателя.