Наличие кинематической схемы привода упростит выбор типа редуктора. Конструктивно редукторы подразделяются на следующие виды:
Червячный одноступенчатый со скрещенным расположением входного/выходного вала (угол 90 градусов).
Червячный двухступенчатый с перпендикулярным или параллельным расположением осей входного/выходного вала. Соответственно, оси могут располагаться в разных горизонтальных и вертикальных плоскостях.
Цилиндрический горизонтальный с параллельным расположением входного/выходного валов. Оси находятся в одной горизонтальной плоскости.
Цилиндрический соосный под любым углом . Оси валов располагаются в одной плоскости.
В коническо-цилиндрическом редукторе оси входного/выходного валов пересекаются под углом 90 градусов.
ВАЖНО!
Расположение выходного вала в пространстве имеет определяющее значение для ряда промышленных применений.
- Конструкция червячных редукторов позволяет использовать их при любом положении выходного вала.
- Применение цилиндрических и конических моделей чаще возможно в горизонтальной плоскости. При одинаковых с червячными редукторами массо-габаритных характеристиках эксплуатация цилиндрических агрегатов экономически целесообразней за счет увеличения передаваемой нагрузки в 1,5-2 раза и высокого КПД.
Таблица 1. Классификация редукторов по числу ступеней и типу передачи
| Тип редуктора | Число ступеней | Тип передачи | Расположение осей |
|---|---|---|---|
| Цилиндрический | 1 | Одна или несколько цилиндрических | Параллельное |
| 2 | Параллельное/соосное | ||
| 3 | |||
| 4 | Параллельное | ||
| Конический | 1 | Коническая | Пересекающееся |
| Коническо-цилиндрический | 2 |
Коническая Цилиндрическая (одна или несколько) |
Пересекающееся/скрещивающееся |
| 3 | |||
| 4 | |||
| Червячный | 1 | Червячная (одна или две) | Скрещивающееся |
| 1 | Параллельное | ||
| Цилиндрическо-червячный или червячно-цилиндрический | 2 |
Цилиндрическая (одна или две) Червячная (одна) |
Скрещивающееся |
| 3 | |||
| Планетарный | 1 | Два центральных зубчатых колеса и сателлиты (для каждой ступени) | Соосное |
| 2 | |||
| 3 | |||
| Цилиндрическо-планетарный | 2 |
Цилиндрическая (одна или несколько) |
Параллельное/соосное |
| 3 | |||
| 4 | |||
| Коническо-планетарный | 2 | Коническая (одна) Планетарная (одна или несколько) | Пересекающееся |
| 3 | |||
| 4 | |||
| Червячно-планетарный | 2 |
Червячная (одна) Планетарная (одна или несколько) |
Скрещивающееся |
| 3 | |||
| 4 | |||
| Волновой | 1 | Волновая (одна) | Соосное |
Передаточное число [I]
Передаточное число редуктора рассчитывается по формуле:
I = N1/N2
где
N1 – скорость вращения вала (количество об/мин) на входе;
N2 – скорость вращения вала (количество об/мин) на выходе.
Полученное при расчетах значение округляется до значения, указанного в технических характеристиках конкретного типа редукторов.
Таблица 2. Диапазон передаточных чисел для разных типов редукторов
ВАЖНО!
Скорость вращения вала электродвигателя и, соответственно, входного вала редуктора не может превышать 1500 об/мин. Правило действует для любых типов редукторов, кроме цилиндрических соосных со скоростью вращения до 3000 об/мин. Этот технический параметр производители указывают в сводных характеристиках электрических двигателей.
Крутящий момент редуктора
Крутящий момент на выходном валу – вращающий момент на выходном валу. Учитывается номинальная мощность , коэффициент безопасности [S], расчетная продолжительность эксплуатации (10 тысяч часов), КПД редуктора.
Номинальный крутящий момент – максимальный крутящий момент, обеспечивающий безопасную передачу. Его значение рассчитывается с учетом коэффициента безопасности – 1 и продолжительность эксплуатации – 10 тысяч часов.
Максимальный вращающий момент {M2max] – предельный крутящий момент, выдерживаемый редуктором при постоянной или изменяющейся нагрузках, эксплуатации с частыми пусками/остановками. Данное значение можно трактовать как моментальную пиковую нагрузку в режиме работы оборудования.
Необходимый крутящий момент – крутящий момент, удовлетворяющим критериям заказчика. Его значение меньшее или равное номинальному крутящему моменту.
Расчетный крутящий момент – значение, необходимое для выбора редуктора. Расчетное значение вычисляется по следующей формуле:
Mc2 = Mr2 x Sf ≤ Mn2
где
Mr2 – необходимый крутящий момент;
Sf – сервис-фактор (эксплуатационный коэффициент);
Mn2 – номинальный крутящий момент.
Эксплуатационный коэффициент (сервис-фактор)
Сервис-фактор (Sf) рассчитывается экспериментальным методом. В расчет принимаются тип нагрузки, суточная продолжительность работы, количество пусков/остановок за час эксплуатации мотор-редуктора. Определить эксплуатационный коэффициент можно, используя данные таблицы 3.
Таблица 3. Параметры для расчета эксплуатационного коэффициента
| Тип нагрузки | К-во пусков/остановок, час | Средняя продолжительность эксплуатации, сутки | |||
|---|---|---|---|---|---|
| <2 | 2-8 | 9-16h | 17-24 | ||
| Плавный запуск, статичный режим эксплуатации, ускорение массы средней величины | <10 | 0,75 | 1 | 1,25 | 1,5 |
| 10-50 | 1 | 1,25 | 1,5 | 1,75 | |
| 80-100 | 1,25 | 1,5 | 1,75 | 2 | |
| 100-200 | 1,5 | 1,75 | 2 | 2,2 | |
| Умеренная нагрузка при запуске, переменный режим, ускорение массы средней величины | <10 | 1 | 1,25 | 1,5 | 1,75 |
| 10-50 | 1,25 | 1,5 | 1,75 | 2 | |
| 80-100 | 1,5 | 1,75 | 2 | 2,2 | |
| 100-200 | 1,75 | 2 | 2,2 | 2,5 | |
| Эксплуатация при тяжелых нагрузках, переменный режим, ускорение массы большой величины | <10 | 1,25 | 1,5 | 1,75 | 2 |
| 10-50 | 1,5 | 1,75 | 2 | 2,2 | |
| 80-100 | 1,75 | 2 | 2,2 | 2,5 | |
| 100-200 | 2 | 2,2 | 2,5 | 3 | |
Мощность привода
Правильно рассчитанная мощность привода помогает преодолевать механическое сопротивление трения, возникающее при прямолинейных и вращательных движениях.
Элементарная формула расчета мощности [Р] – вычисление соотношения силы к скорости.
При вращательных движениях мощность вычисляется как соотношение крутящего момента к числу оборотов в минуту:
P = (MxN)/9550
где
M – крутящий момент;
N – количество оборотов/мин.
Выходная мощность вычисляется по формуле:
P2 = P x Sf
где
P – мощность;
Sf – сервис-фактор (эксплуатационный коэффициент).
ВАЖНО!
Значение входной мощности всегда должно быть выше значения выходной мощности, что оправдано потерями при зацеплении:
P1 > P2
Нельзя делать расчеты, используя приблизительное значение входной мощности, так как КПД могут существенно отличаться.
Коэффициент полезного действия (КПД)
Расчет КПД рассмотрим на примере червячного редуктора. Он будет равен отношению механической выходной мощности и входной мощности:
ñ [%] = (P2/P1) x 100
где
P2 – выходная мощность;
P1 – входная мощность.
ВАЖНО!
В червячных редукторах P2 < P1 всегда, так как в результате трения между червячным колесом и червяком, в уплотнениях и подшипниках часть передаваемой мощности расходуется.
Чем выше передаточное отношение, тем ниже КПД.
На КПД влияет продолжительность эксплуатации и качество смазочных материалов, используемых для профилактического обслуживания мотор-редуктора.
Таблица 4. КПД червячного одноступенчатого редуктора
| Передаточное число | КПД при a w , мм | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 40 | 50 | 63 | 80 | 100 | 125 | 160 | 200 | 250 | |
| 8,0 | 0,88 | 0,89 | 0,90 | 0,91 | 0,92 | 0,93 | 0,94 | 0,95 | 0,96 |
| 10,0 | 0,87 | 0,88 | 0,89 | 0,90 | 0,91 | 0,92 | 0,93 | 0,94 | 0,95 |
| 12,5 | 0,86 | 0,87 | 0,88 | 0,89 | 0,90 | 0,91 | 0,92 | 0,93 | 0,94 |
| 16,0 | 0,82 | 0,84 | 0,86 | 0,88 | 0,89 | 0,90 | 0,91 | 0,92 | 0,93 |
| 20,0 | 0,78 | 0,81 | 0,84 | 0,86 | 0,87 | 0,88 | 0,89 | 0,90 | 0,91 |
| 25,0 | 0,74 | 0,77 | 0,80 | 0,83 | 0,84 | 0,85 | 0,86 | 0,87 | 0,89 |
| 31,5 | 0,70 | 0,73 | 0,76 | 0,78 | 0,81 | 0,82 | 0,83 | 0,84 | 0,86 |
| 40,0 | 0,65 | 0,69 | 0,73 | 0,75 | 0,77 | 0,78 | 0,80 | 0,81 | 0,83 |
| 50,0 | 0,60 | 0,65 | 0,69 | 0,72 | 0,74 | 0,75 | 0,76 | 0,78 | 0,80 |
Таблица 5. КПД волнового редуктора
Таблица 6. КПД зубчатых редукторов
Взрывозащищенные исполнения мотор-редукторов
Мотор-редукторы данной группы классифицируются по типу взрывозащитного исполнения:
- «Е» – агрегаты с повышенной степенью защиты. Могут эксплуатироваться в любом режиме работы, включая внештатные ситуации. Усиленная защита предотвращает вероятность воспламенений промышленных смесей и газов.
- «D» – взрывонепроницаемая оболочка. Корпус агрегатов защищен от деформаций в случае взрыва самого мотор-редуктора. Это достигается за счет его конструктивных особенностей и повышенной герметичности. Оборудование с классом взрывозащиты «D» может применяться в режимах предельно высоких температур и с любыми группами взрывоопасных смесей.
- «I» – искробезопасная цепь. Данный тип взрывозащиты обеспечивает поддержку взрывобезопасного тока в электрической сети с учетом конкретных условий промышленного применения.
Показатели надежности
Показатели надежности мотор-редукторов приведены в таблице 7. Все значения приведены для длительного режима эксплуатации при постоянной номинальной нагрузке. Мотор-редуктор должен обеспечить 90% указанного в таблице ресурса и в режиме кратковременных перегрузок. Они возникают при пуске оборудования и превышении номинального момента в два раза, как минимум.
Таблица 7. Ресурс валов, подшипников и передач редукторов
По вопросам расчета и приобретения мотор редукторов различных типов обращайтесь к нашим специалистам. можно ознакомиться с каталогом червячных, цилиндрических, планетарных и волновых мотор-редукторов, предлагаемых компанией Техпривод.
Романов Сергей Анатольевич,
руководитель отдела механики
компании Техпривод.
Другие полезные материалы:
Как правильно подобрать электродвигатель
Мотор - редуктор (от англ. "reduce" - уменьшать, снижать и "мотор" - двигатель)- это электромеханическое устройство, совмещающее в одном корпусе редутор и электрический двигатель.
Главные факторы при выборе мотор-редуктора являются - величина передаваемого крутящего момента,
- окружная скорость,
- взаимное расположение осей,
- КПД (коэффициент полезного действия),
- режим работы механизма.
Передаточное число U мотор-редуктора равно произведению передаточных чисел k его ступеней
его можно также найти по формуле i=n1/n2 (n1 - частота вращения электродвигателя электрического типа, требуемое кол-во оборотов/мин)
Также можно узнать передаточное число посчитав число зубьев на ведущей и ведомой шестернях и рассчитав их отношение.
Под мощностью мотор-редуктора подразумевается - номинальная входная и выходная мощность, она находится в прямой зависимости от электродвигателя и передаточного числа
Коэффициент полезного действия - это соотношение полезной работы к затраченной. КПД мотор-редуктора аналогично равен произведению КПД его степеней.
η=η1*η2*η3*...ηk
Динамический КПД - это отношение мощности получаемой на выходном валу приложенной в входному валу на входе. Выделяют также статический КПД.
Максимальные величины передаточных чисел и КПД мотор-редукторов
Современные мотор-редукторы могут быть в горизонтальном и вертикальном исполнениях с одинаковыми параметрами.
Способы сборки корпусов мотор-редукторов (картеров): радиальный; осевой.
Радиальный - корпус собирается по осям валов, плоскость разъема расположена горизонтально.
Осевая сборка реализуется осевым перемещением закладываемых в корпус валов с зубчатыми колесами и подшипниками. В этой сборке подразумевается несколько разъемов корпуса.
Обычно мотор-редуктор имеет три ступени. Быстроходную, промежуточную и тихоходную, ступени переключаются с помощью шестерен.
Повышение момента редуктора приводит к увеличению массы, поэтому для крупногабаритной мощной техники и станков они изготавливаются индивидуально.

Компания НПП "Сервомеханизмы" предлагает три модели компактных мотор-редукторов с небольшим моментом:
MR15 (крутящий момент 3 Нм)
MR31 (крутящий момент 15 Нм)
MR40FC (крутящий момент 15 Нм)
Крепление двигателя с помощью фланца В14, по умолчанию монтирован двигатель постоянного тока 24B или 12В, следящий магнитный энкодер, у модели 40 FC встроенные концевые выключатели для контроля вращения выходного вала и вращающийся потенциометр.
Но кроме этого, мы предлагаем электродвигатели и редукторы отдельно, из которых можно скомплекторать мотор-редутор по индивидуальному запросу, а также конечно заказать готовый механизм.
Так как электродвигатели уже широко освещены на нашем сайте, рассмотрим более подробно сами редукторы, типы их передач и способы крепления к двигателю.
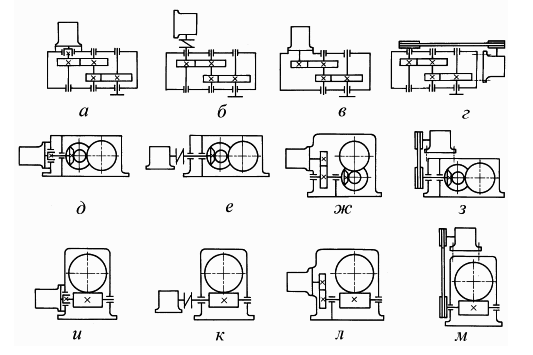
Cпособы соединения вала двигателя и вала редуктора:

1) вал к валу - используют если хотят уменьшить габариты и массу механизма.
2) соединение с помощью компенсирующей муфты - для компенсации смещений (угловых, осевых, радиальных) и погрешностей при сборке, но при этом габариты привода увеличиваются.
Компенсирующие муфты бывают жесткие и гибкие (упругие, эластиные), смягчающие удары.
Некоторые производители редукторов конструируют собственные полумуфты и делают один конец вала уже с полумуфтой, другая половина полумуфты со зведочкой входит в комплект.
3) соединение шестерней - червячный или коническо цилиндрический мотор-редуктор становится цилиндро червячным или цилиндро-коническо-цилиндрическим. Соединенные валы нагружаются силами, действующими на зубья шестерни.
4) клиноременная передача - также увелиничает габатиры окончательного механизма, нагузку на валы определяет сила предварительного натяжения ремней.Натяжение ремня происходит с помощью соединений шпилька-гайка, предварительно усиливают подшипниковый узел, ближний к присоединительному концу входного вала редуктора.
Мотор-редукторы с приводом от двигателя клиноременной передачей за рубежом изготавливают на базе основного (на лапах, с фланцем или насадного) исполнения редуктора.
6) насаживание мотор-редуктора на приводной вал
Насадное исполнение мотор-редуктора широко распространено и позволяет уменьшить осевые габаритные размеры. Осевую фиксацию обеспечивает гайка.
Они обычно изготавливаются по модульному принципу (из составных унифицированных частей).
а, д, и – соединение «вал к валу»,
б, е, к – соединения компенсирующей муфтой,
в, ж, л – соединения шестерней,
г, з, м – соединение клиноременной передачей.
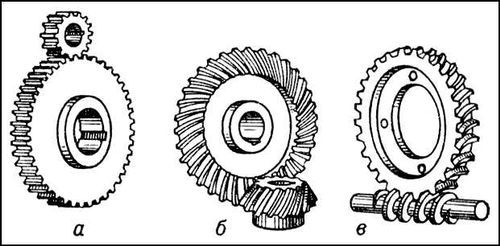
Виды зубчатых передач
В редукторах для передачи вращательного движения применяются зубчатые колеса, образующие зубчатые зацепления, передающие движение на валы.
Зубчатые передачи бывают -
- цилиндрический (вращательное движенеи при параллельных осях, a)
- конические (вращательное движение при пересекающихся осях б)
- червячные и гипоидные - (при скрещивающихся осях, в)
Зубчатые передачи бывают с внешним и внутренним зацеплением.
Червячные зубчатые колеса выполняются цельными литыми,или кованными или составными. Степень точность зубчатых колес и передач определяется их конструкцией, назначением, скоростью и условиями работы механизмов. Зубчатое колесо с небольшим числом зубьев обычно называют шестерней, а с частыми зубьями - колесом.
Также передачи отличаются типом зацепления, отечественные мотор-редуторы изготавливают обычно с прямозубым зацеплением, тогда как на западе распространены более точные -косозубые.
Для обслуживания зубчатых передач применяют жидкие смазочные материлы, минеральные и синтетические масла. С синететическим маслом, согласно результатов исследований КПД несколько выше.
Конические передачи обычно используются при скорости до 30 м/с, червячные - до 12 м/с, глобоидные - до 20 м/с. С увеличением окружной скорости передач необходимо обеспечивать более точное изготовление колес.
Выбор подшипников и их установка в редукторах зависят от вида зацепления, нагрузки, расстояния между опорами, способа смазывания и охлаждения, условий монтажа и эксплуатации. В редукторах применяются подшипники качения и подшипниками скольжения, при скорости до 15 м/с обычно используют первые. Правильная установка подшипников качения является одним из важных параметров работы.
В последнее время были разработаны высокотехнологичные и экономически выгодные конструкции редукторов, отличающиеся долговечностью и высокой надежностью, высокими скоростями и точностью. В основном такая продукция производится в Европе, например, таковы редукторы Tramec , которые реализует наша компания.
Виды редукторов
Планетарные передача - сложный механизм, состоящий из зубчатых и фрикционных колес, их расположение напоминает планеты солнечной системы, откуда и название. Окружное усилие распределяется между несколькими колесами.
Составные части планетарной передачи:
Солнечная шестерня - находится в самом центре редутора,
Коронная шестреня (еще называют кольцевая) - на переферической стороне, она "окружает" все шестерни и имеет зубцы с внутренней стороны.
Сателлиты (еще называют планетарные) - малые шестерни между коронной и солнечной.
Водило - с внешней стороны не видно, объединяет сателлиты, имеет оси для их вращения

Существует несколько разновидностей конструктивных исполнений планетарных редукторов
В зависимости от передаточного числа могут быть 1-2-3 и многоступенчатыми, планетарные передачи могут быть объединены в одном корпусе с цилиндрическими коническими или червячными.
Валы редуктора могут располагать горизонтально и вертикально, на подшипниках скольжения (при высоких скоростях)или качения (при малых и средних скоростях)
В планетарных редукторах может быть большее количество передач. Окружное усилие распределяется между несколькими зубчатыми колесами.
Обеспечение максимальной точности способствует равномерному распределению нагрузки.
Моменты, передаваемые этими редукторами могут быть до 4000 кН*м
Для передачи больших мощностей используются зубчатые колеса меньшего диаметра, чем у цилиндрическими передач.
Планетарные передачи нуждаются в меньшем количестве масла для смазки, требуют высокой точности изготовления, имеют повышенный момент инерции
Если в редуторе несколько планетарных передач - это дифференциальный редуктор .
Мотор редуктор представляет собой устройство, объединяющее в одном блок-корпусе два механизма: мотор (в виде электрического двигателя) и редуктор. Мотор служит для преобразования электрической энергии в механическую. Редуктор в свою очередь выполняет силовую задачу, преобразовывая высокие обороты двигателя, в мощный крутящий момент, при этом уменьшая высокие обороты электрического двигателя. Так же мотор-редукторы бывают разных типов: червячные, зубчатые, гидравлические.
Мотор редуктор применяется во многих сферах и отраслях. А именно в тех случаях, когда требуется мощный крутящий момент, например: в бетономешалках, конвейерах, строительных кранах и многих других областях.
Разновидности мотор-редукторов
Цилиндрический — самый распространенный и востребованный вид в технике и промышленности, который обладает надежностью и высоким КПД приблизительно 90%. Не заменим при интенсивной эксплуатации и часто применяются в промышленной отрасли. В данном типе мотор-редуктора, взята соосная схема расположения двигателя, по отношению к редуктору. Так же удобен при установке и монтаже.
Конический — так же обладает высоким КПД и широко применяется на конвейерных линиях и не только. Имеет пересекающеюся осью входного и выходного вала, тем самым позволяя изменять направления кинетических передач.
Червячный — имеет не высокое КПД, и большую теплоотдачу. Плюсами данного вида мотор-редуктора является высокое передаточное число, плавность хода и бесшумная работа аппарата в целом. Так же червячный мотор-редуктор обладает самоторможением, на определенном передаточном числе, тем самым не нуждаясь в дополнительных тормозных устройствах во время использования.
Планетарный — выдерживает достаточно большие нагрузки и имеет небольшой вес и размер. Принцип работы такого вида мотор-редуктора заключается во вращении центрального вала
Волновые — считается самым современным и высокотехнологичным видом данного оборудования. обладает волновым типом передач. Имеют не большой вес и компактность. При минимальном передвижении частей, имеет большое передаточное число, плавный ход и дает возможность использования на высокоточных агрегатах.